

Unmanned-aerial-vehicle visual-SLAM (Simultaneous Localization and Mapping) method based on binocular camera, unmanned aerial vehicle and storage medium
A technology for binocular cameras and drones, which is applied in image data processing, editing/combining graphics or text, instruments, etc., can solve the problems of simultaneous use of multiple cameras and mutual interference, easy to be interfered by sunlight, etc., so as to solve the problem of interference. The effect of questions, precise maps, precise positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
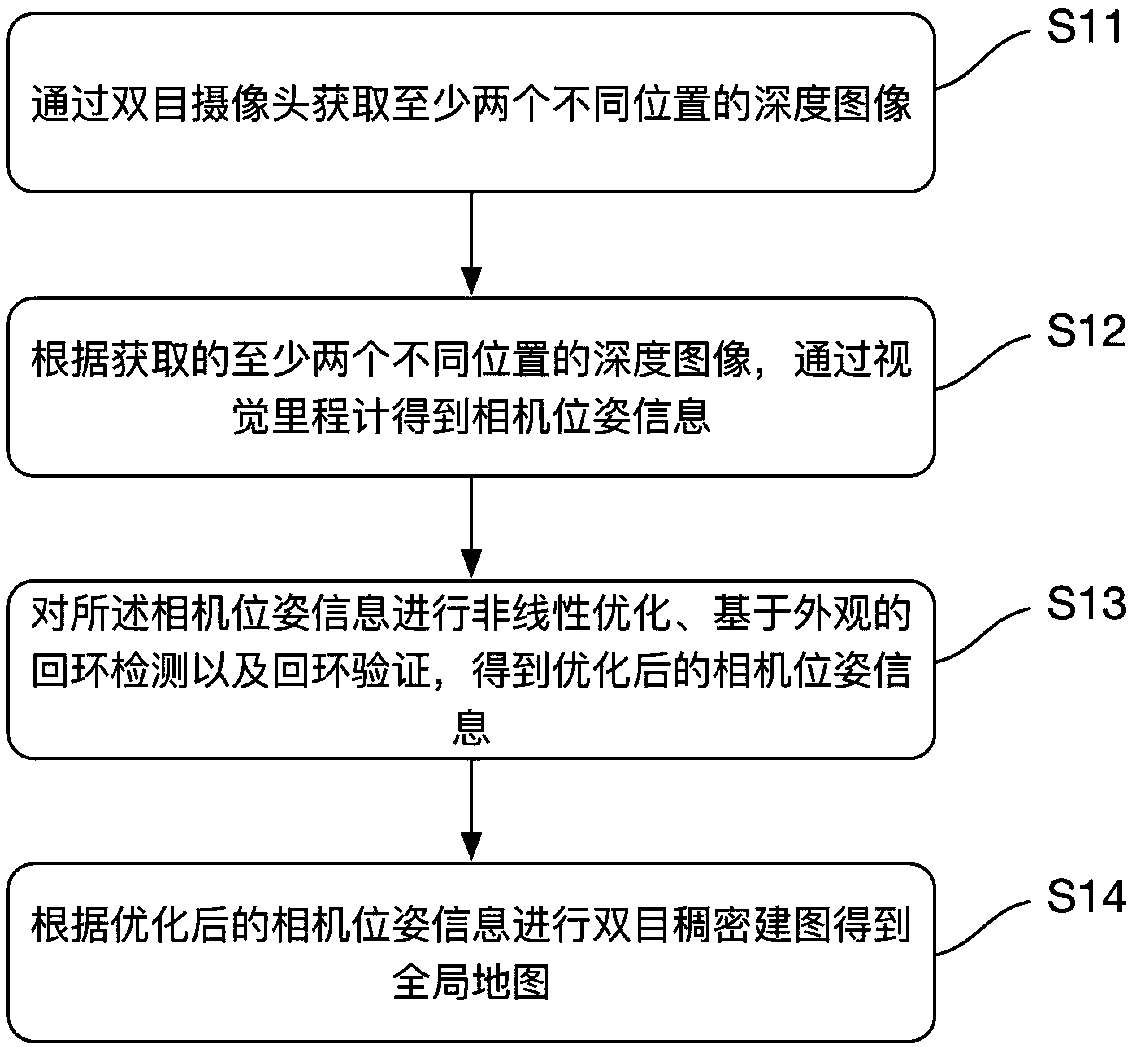
[0034] like figure 1 As shown, the first embodiment of the present invention provides a binocular camera-based UAV visual SLAM method, the method comprising steps:
[0035] S11. Obtain depth images of at least two different positions through a binocular camera.
[0036] In this embodiment, the left and right eye images can be obtained respectively through the binocular camera, and the stereo vision technology is used to calculate the pixel distance through the left and right eye disparity to obtain a depth image, which contains the three-dimensional world coordinate information of all pixels.
[0037] S12. According to the acquired depth images of at least two different positions, the camera pose information is obtained through the visual odometry.
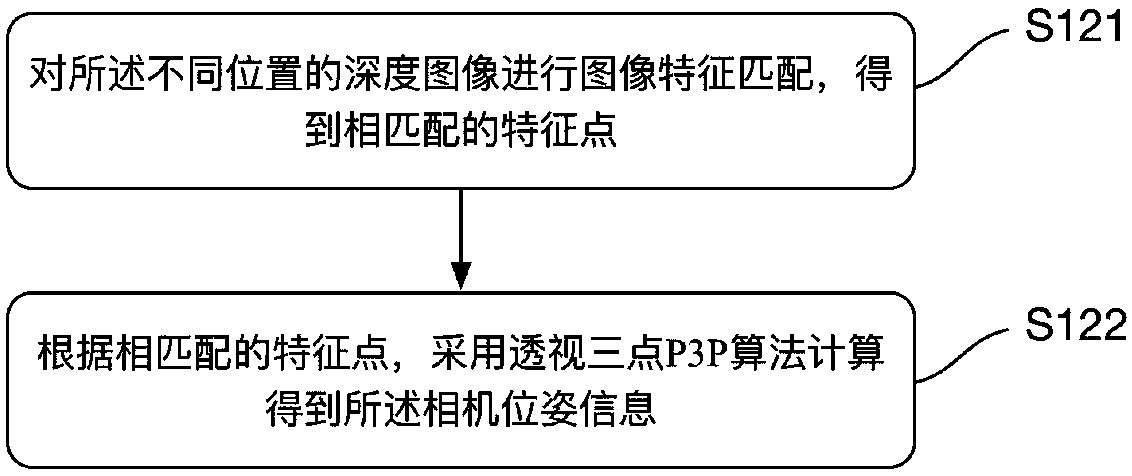
[0038] Please refer to figure 2 As shown, in this embodiment, according to the depth images of the different positions, obtaining the camera pose information through the visual odometer includes steps:
[0039] S121. Perform i...
no. 2 example
[0064] refer to Figure 4 , Figure 4 An unmanned aerial vehicle provided by the second embodiment of the present invention, the unmanned aerial vehicle 20 includes: a memory 21, a processor 22, and a dual-based The UAV visual SLAM program of the eye camera, when the UAV visual SLAM program based on the binocular camera is executed by the processor 22, it is used to realize the UAV visual SLAM method based on the binocular camera as described below A step of:
[0065] S11. Obtain depth images of at least two different positions through a binocular camera;
[0066] S12. According to the acquired depth images of at least two different positions, the camera pose information is obtained through the visual odometry;
[0067] S13. Perform nonlinear optimization, appearance-based loop closure detection and loop closure verification on the camera pose information to obtain optimized camera pose information;
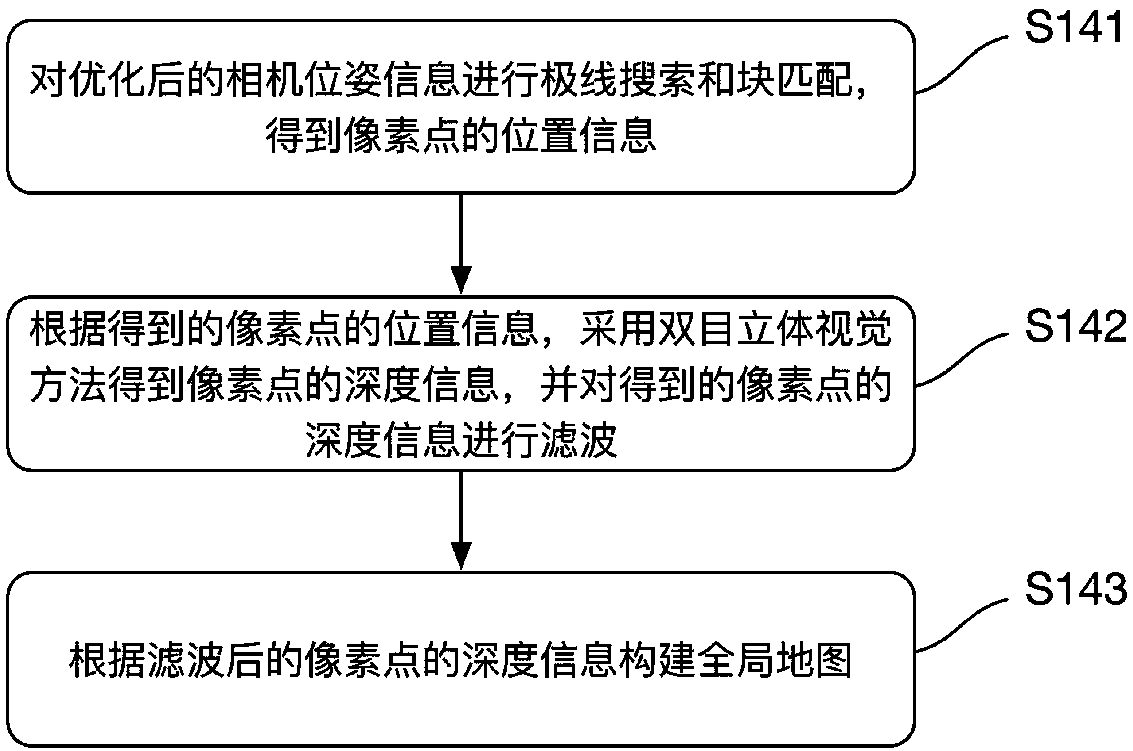
[0068] S14. Perform binocular dense mapping according to the optimized c...
no. 3 example
[0088] The third embodiment of the present invention provides a computer-readable storage medium, the computer-readable storage medium is stored with a UAV visual SLAM program based on a binocular camera, and the UAV visual SLAM program based on a binocular camera When executed by the processor, the steps of the binocular camera-based UAV visual SLAM method described in the first embodiment are realized.
[0089] The computer-readable storage medium provided by the embodiment of the present invention obtains depth images at different positions through a binocular camera, and performs binocular dense mapping to obtain a global map after visual odometer, nonlinear optimization, loopback detection, and loopback verification; On the one hand, it can solve the interference problem of using RGB-D cameras, on the other hand, it can obtain more accurate positioning and establish a more accurate map.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More