

Vascular intervention surgical robot operating handle with handfeel and control method thereof
A technology of interventional surgery and operating handle, which is applied in the field of vascular interventional surgery robot operating handle and its control, which can solve problems such as difficulty, adjustment of dynamic range of loading force and torque, etc., to increase safety and stability, solve coupling, and enhance hand feeling and presence effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0075] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
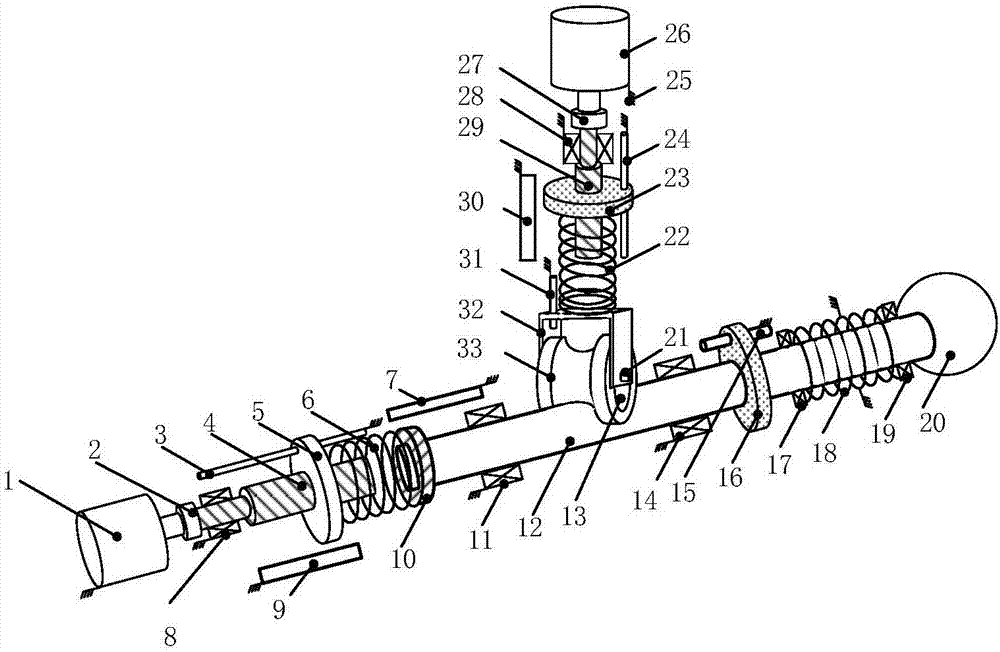
[0076] like figure 1 As shown, according to the present invention, an operating handle of a vascular interventional surgery robot with hand feeling is provided, including a frame 25, an operating device, a force loading mechanism and a torque loading mechanism, wherein: the operating device is used to send rotation and / or push-pull catheter guide The operation command of the wire; the force loading mechanism is used to feed back the push-pull resistance received when pushing and pulling the catheter gui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More