Method for avoiding collisions between two robots
A robot and robot system technology, applied in the direction of instruments, manipulators, general control systems, etc., can solve the problem that the robot's ability is not fully utilized
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
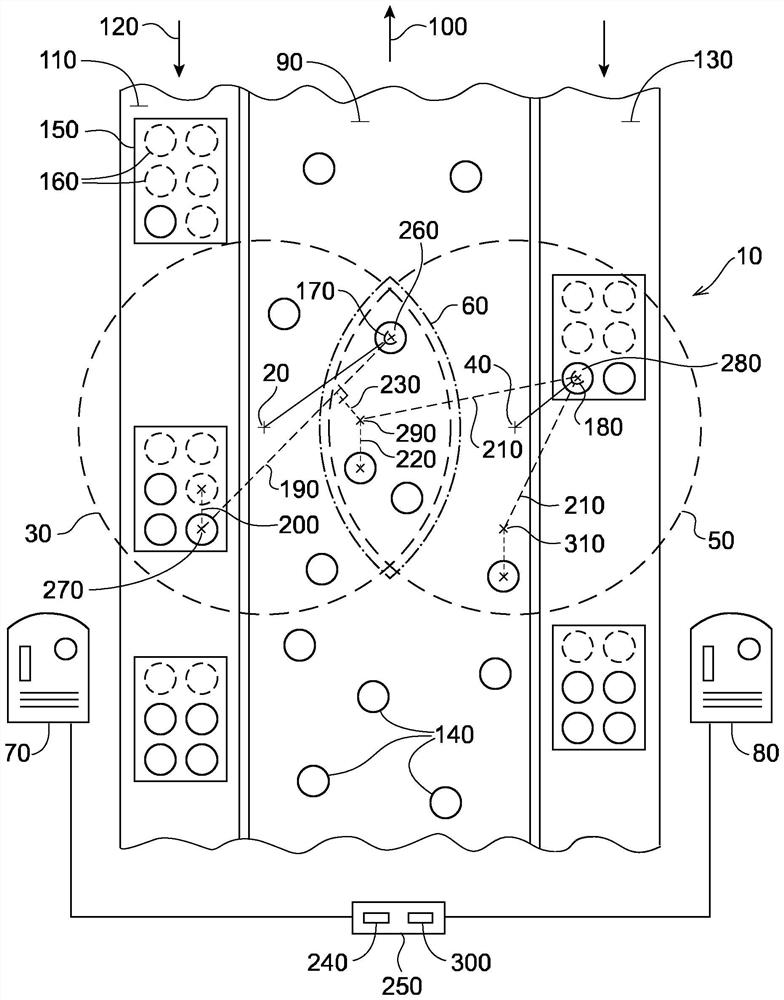
[0023] see figure 1 , the robot system 10 according to one embodiment of the present invention includes a first robot 20 having a first working area 30 and a second robot 40 having a second working area 50 . The first working area 30 overlaps the second working area 50 to thereby define an overlapping working area 60 . The first robot controller 70 controls the movement of the first robot 20 , and the second robot controller 80 controls the movement of the second robot 40 .
[0024] The robotic system 10 further includes a product conveyor 90 moving in a first direction 100 , a first container conveyor 110 moving in a second direction 120 , and a second container conveyor 130 also moving in the second direction 120 . The second direction 120 is opposite to the first direction 100 . The product conveyor 90 transports thereon articles 140 distributed randomly across the length and width of the product conveyor 90 . First and second container conveyors 110 , 130 transport ther...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com