

Designing method of self-adaption backstepping controller of full vehicle active suspension system
A technology of adaptive control and active suspension, applied in design optimization/simulation, instrumentation, calculation, etc., can solve problems such as increasing vehicle cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
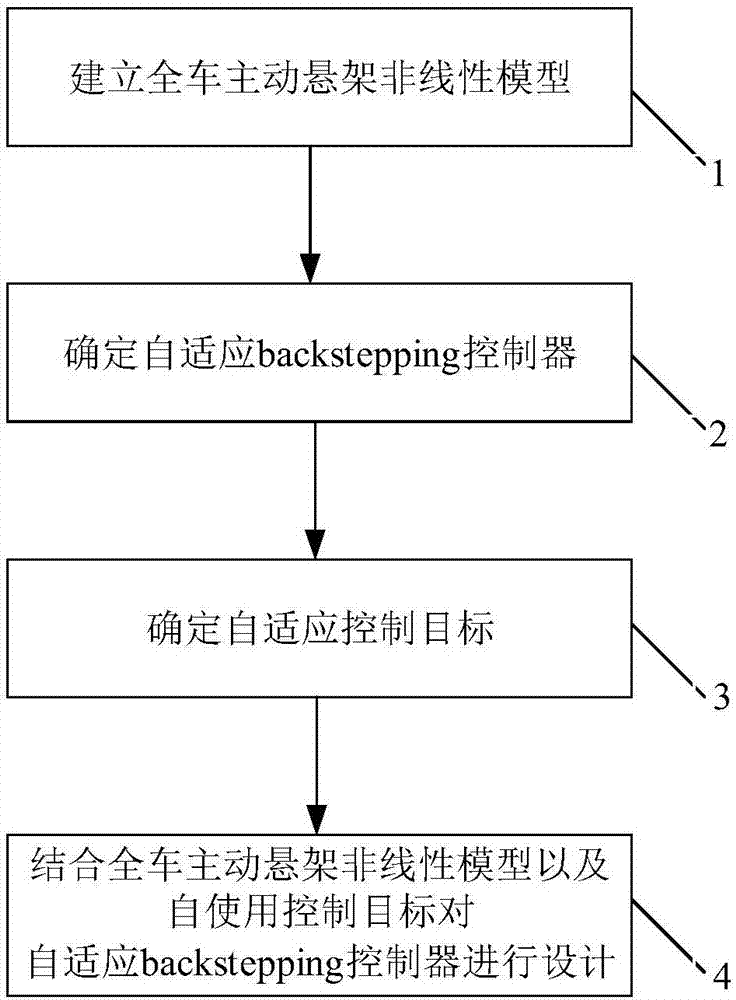
[0092] Such as figure 1 As shown, a method for designing an adaptive backstepping controller for an active suspension system of a whole vehicle, the method includes the following steps:
[0093] (1) Establish a nonlinear model of the active suspension of the whole vehicle;
[0094] (2) Determine the adaptive backstepping controller, the adaptive backstepping controller includes a front right suspension controller, a front left suspension controller, a rear right suspension controller and a rear left suspension controller, each controller Connect the actuators of the corresponding suspensions respectively;
[0095] (3) Determine the adaptive control target;
[0096] (4) The control law of the adaptive backstepping controller is determined by combining the nonlinear model of the whole vehicle active suspension and the adaptive control objective.
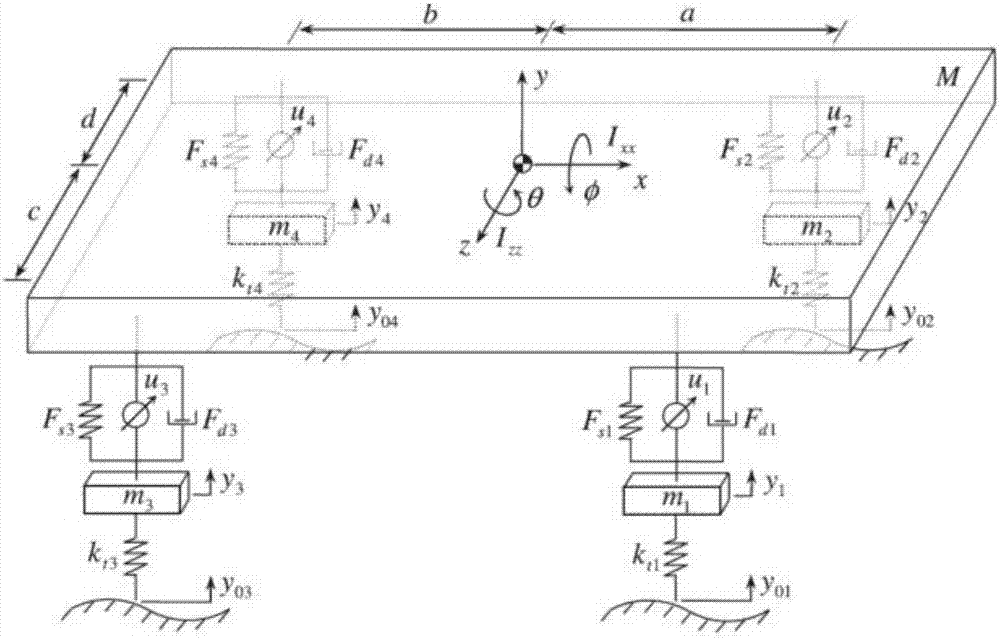
[0097] The non-linear model of the active suspension of the whole vehicle is:
[0098]
[0099]
[0100]
[0101]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More