

High-precision automatic calibration device for robot hand-eye camera and using method thereof
A robot hand, automatic calibration technology, applied in the direction of manipulator, program control manipulator, manufacturing tools, etc., to achieve the effect of reducing the amount of calculation, low cost and flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
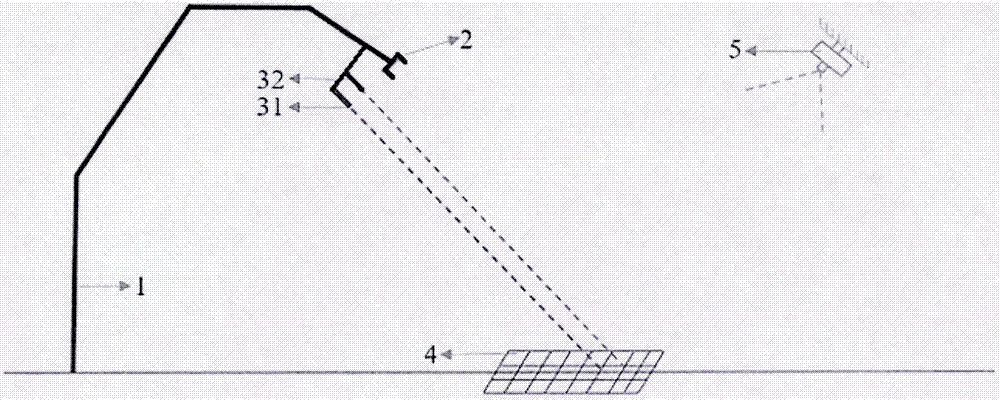
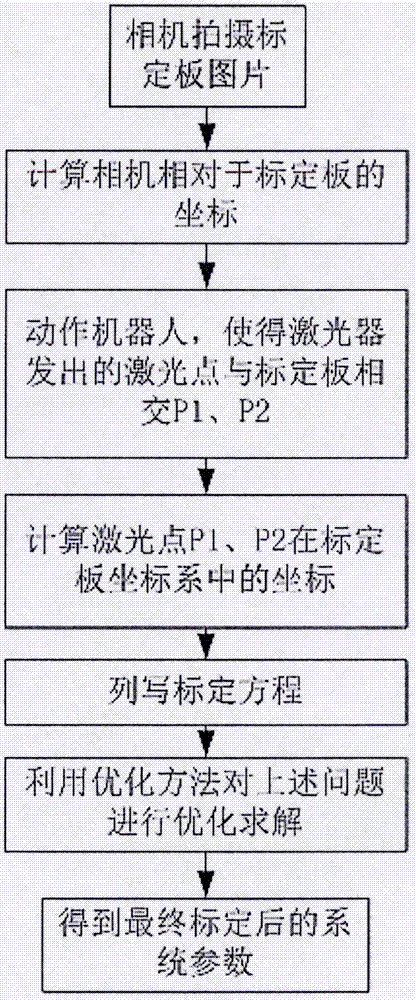
[0043] The present invention proposes to fix the laser generator on the end tool of the robot, then intersect the laser with the calibration plate, then extract the position of the feature point through the camera, and finally use the position of the laser feature point in the calibration plate and the position of the robot coordinate The position in the system can be used to calibrate the relative position of the industrial robot and the camera.
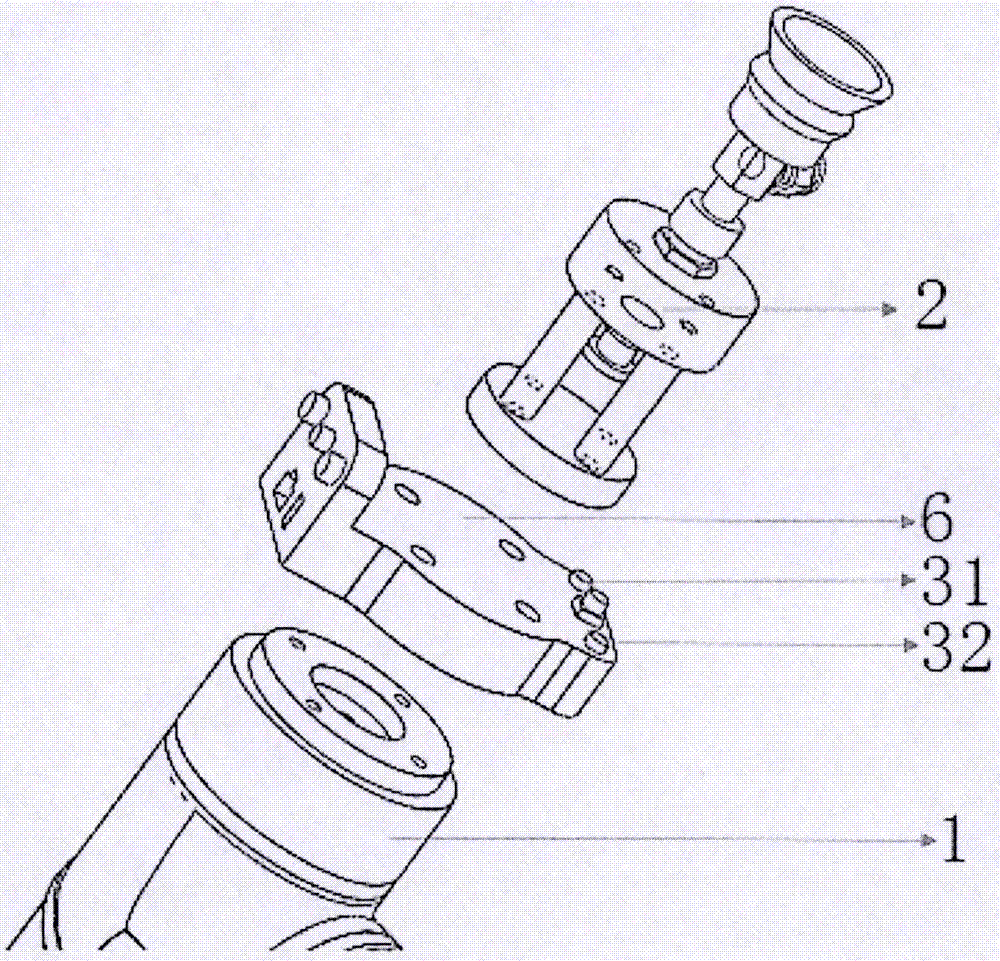
[0044] see Figure 1-6 , a device for automatic calibration of a high-precision robot hand-eye camera, including an industrial robot 1, a robot end tool 2, a laser generator connected to the industrial robot end tool 2, a calibration plate 4 and a camera 5, the industrial robot 1 and the connector 6, the robot end tool 2 is installed on the other side of the connector 6, and a laser generator is install...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More