A leg structure of a footed robot and a footed robot having the same
A robot and leg technology, applied in the leg structure of footed robots and the field of footed robots with it, can solve the problems of limited expansion and contraction of hydraulic cylinders, obstacle surmounting ability of footed robots, influence of center of gravity adjustment ability, movement of footed robots Insufficient space and other problems, to achieve the effect of efficient movement, clear movement principle, and convenient movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
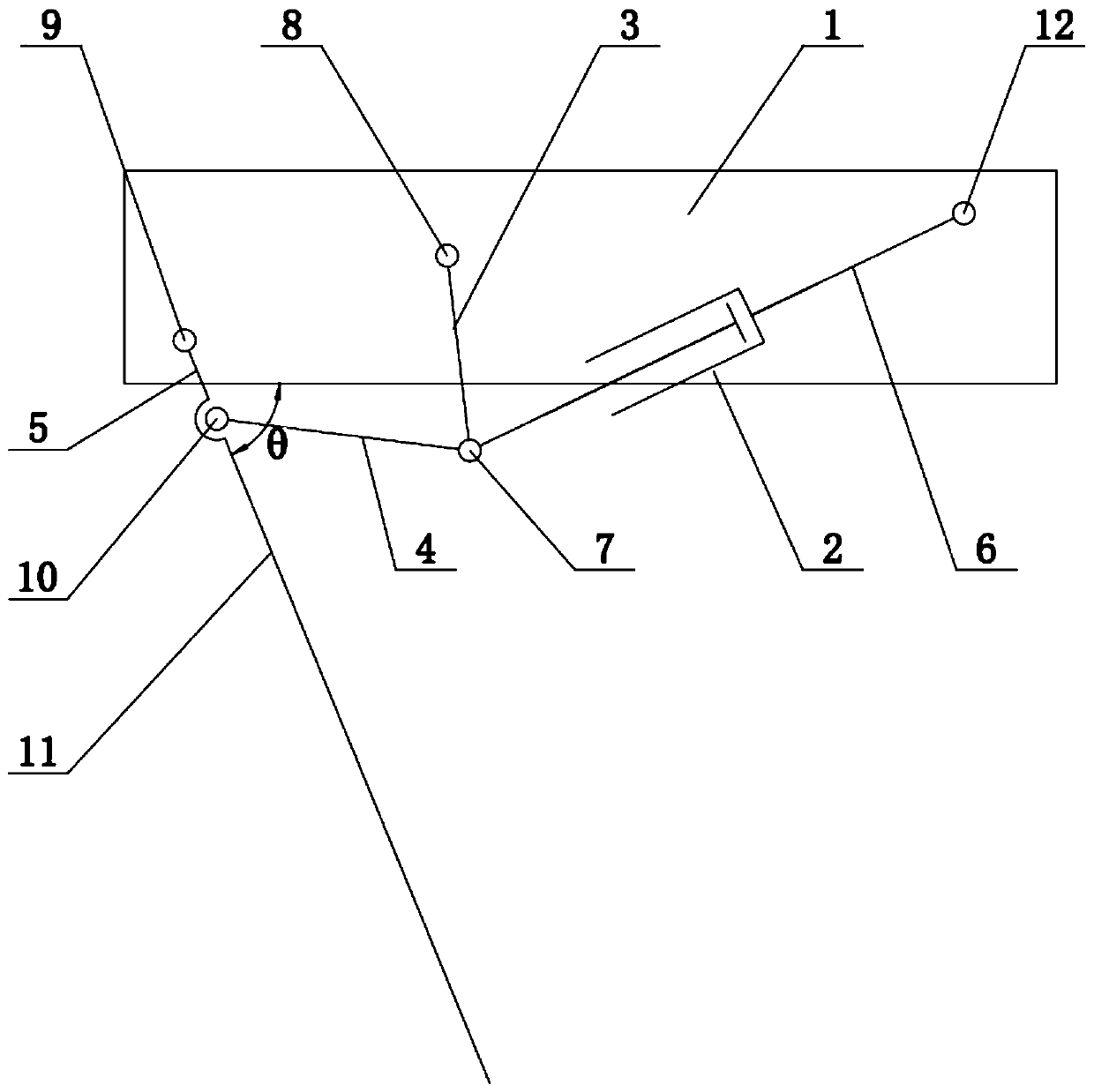
[0030] This embodiment provides a footed robot leg structure, such as figure 1 As shown, the structure includes a crank-rocker mechanism, the rocker 3 of the crank-rocker mechanism is connected with a driving device 2 for driving its rotation, the crank 5 of the crank-rocker mechanism is connected with a moving foot 11, and drives the moving foot 11 swings.
[0031] The crank and rocker mechanism includes a frame 1, a rocker 3, a connecting rod 4 and a crank 5, wherein the free end of the rocker 3 and the connecting rod 4 are hinged at the first hinge point 7, and the fixed end of the rocker 3 is hinged with the frame 1 at the first hinge point 7. Two hinge points 8; the fixed end of the crank 5 and the frame 1 are hinged at the third hinge point 9, and the free end of the crank 5 and the connecting rod 4 are hinged at the fourth hinge point 10. One end of the driving device 2 is hinged to the frame at the fifth hinge point 12 , and the other end is hinged to the rocker 3 . ...
Embodiment 2
[0041] Such as Figure 6 As shown, Embodiment 2 provides a footed robot leg structure, which is basically the same as the footed robot leg structure in Embodiment 1. The difference is that this embodiment adds A second sports foot 17 is provided, that is, a second sports foot 17 is hinged at one end of the sports foot 11, and the second sports foot 11 and the second sports foot 17 are driven and connected by a second drive device and a second crank-rocker mechanism, And the second driving device drives the rocker connected to the second crank-rocker mechanism, and the crank of the second crank-rocker mechanism is hinged to the second moving foot 17 . In this embodiment, the structures of the above-mentioned second driving device and the second crank-rocker mechanism are the same as those of the driving device 2 and the crank-rocker mechanism in Embodiment 1, and will not be repeated here.
[0042] Specifically, in this embodiment, the crank 5 and the sports foot 11 are integr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com