

Method and device for controlling rotational joints of robot to move and robot
A technology of rotating joints and robots, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc. It can solve problems such as affecting accuracy, inaccurate model parameter identification, robot vibration, etc., to achieve improved control performance, good fitting effect, and improved The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
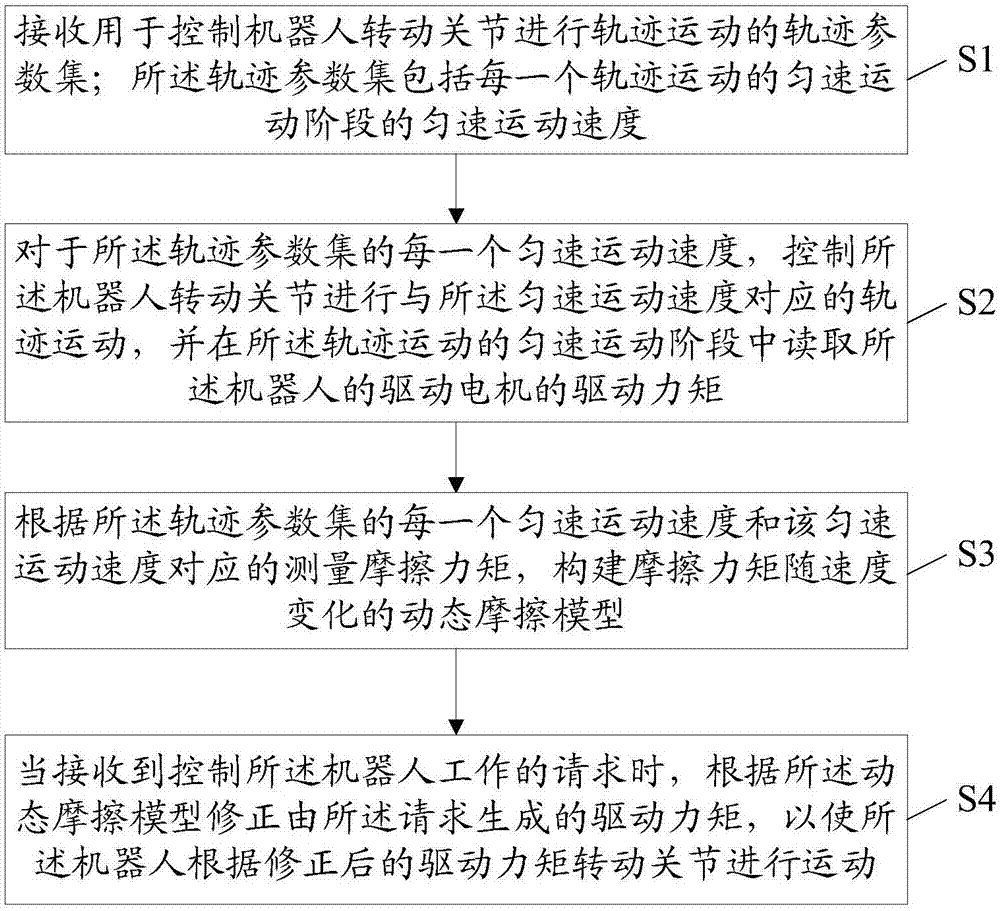
[0045] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0046] The model used in the embodiment of the present invention to describe the friction moment of the robot when the rotating joint is moving is the LuGre friction model, but it is not limited to this model, and other models describing the friction force are also available. , Dynamic friction model for dynamic properties. The mathematical expression of the LuGre friction model is as follows:
[0047]
[0048] Among them, F is the friction torque; v is the vel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More