

High-precision map and sensor fusion based location method of ramp of underground parking garage
An underground parking lot and positioning method technology, applied in the field of automatic driving, can solve the problems of unsuitable indoor ramp vehicle positioning, unsuitable wireless network indoor positioning technology, etc., and achieve good working condition adaptability and accuracy, good The effect of low scalability, design cost, and maintenance cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with accompanying drawings and specific examples. It should be pointed out that the technical solution and design principles of the present invention are only described below with an optimized technical solution, but the protection scope of the present invention is not limited thereto.
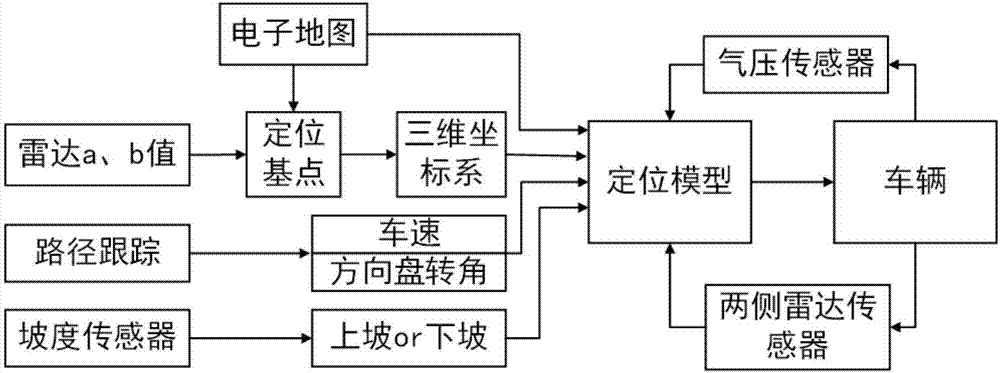
[0018] An underground parking lot ramp positioning method based on high-precision map and sensor fusion of the present invention is to match the value measured by the radar sensors on both sides of the vehicle with the width of the ramp entrance in the high-precision map to construct a three-dimensional positioning coordinate system ; Calculate the mileage value of the vehicle from the wheel speed pulse signal, compare the mileage value with the arc length value of the driving path curve, and calculate the positioning coordinates; improve the universal applicability of the indoor positioning method.
[0019] figure 1 I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More