

CT (computed tomography) guided puncture needle clamping-releasing device for lung puncture robot
A technology for releasing a device and a puncture needle, which is applied in the field of a puncture needle clamping device and a puncture needle clamping and releasing device, can solve the problem that the positioning problem cannot meet the operation accuracy, the puncture operation accuracy is reduced, and the observation of the operation process is affected.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below with reference to the accompanying drawings and examples.
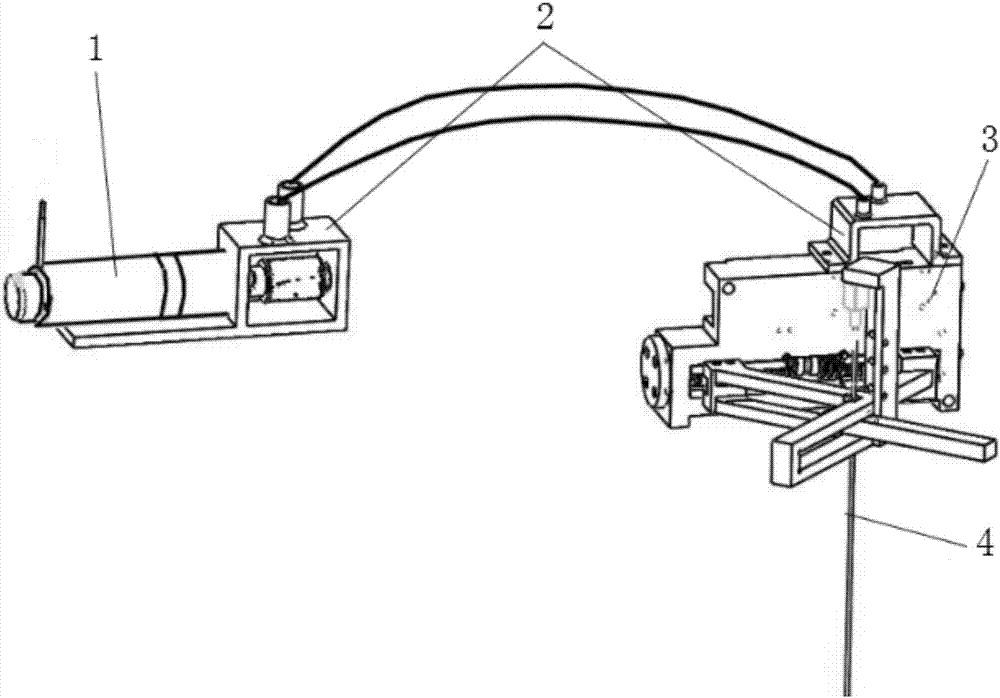
[0025] as attached figure 1 As shown, the present invention provides a clamping and releasing device for a puncture needle of a CT-guided lung puncture robot, the clamping and releasing device includes a distal motor 1, a wire transmission mechanism 2, an actuator 3 and a puncture needle 4;
[0026] The wire drive mechanism 2 is connected between the remote motor 1 and the actuator 3. The remote motor 1 makes the wire drive mechanism transmit the driving force to the actuator 3 through its forward and reverse rotation, and the actuator 3 cooperates with the lead screw and nut pair. Realize the clamping of the puncture needle 4 and the release within the set range.
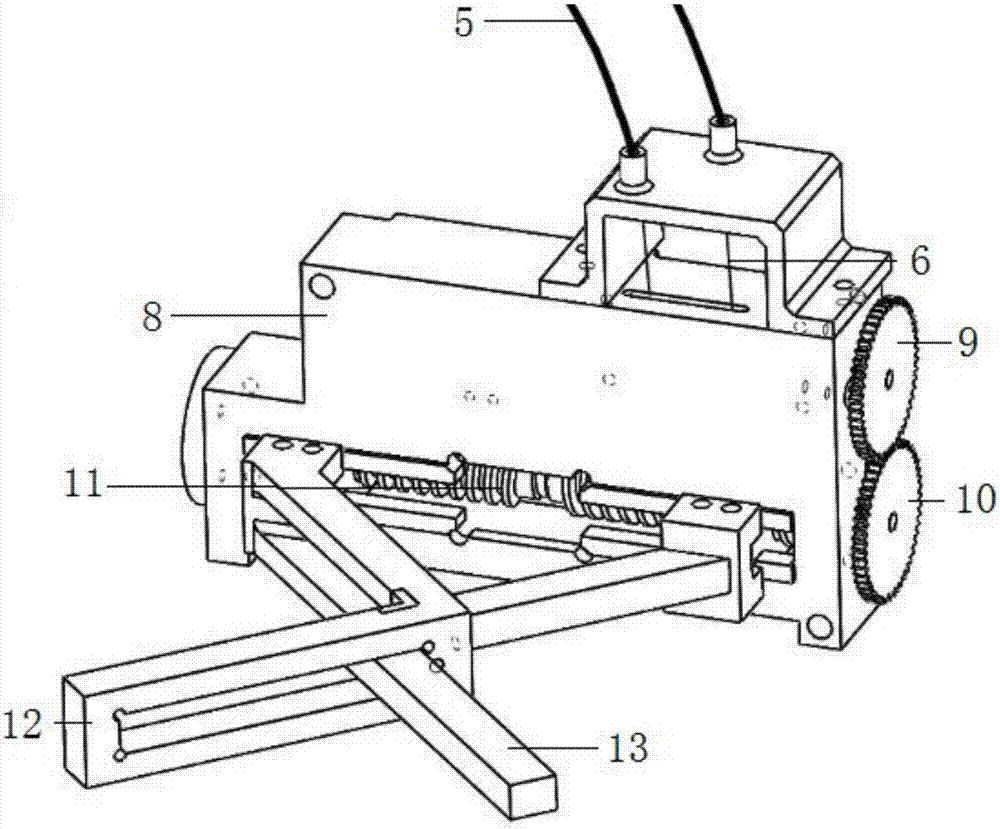
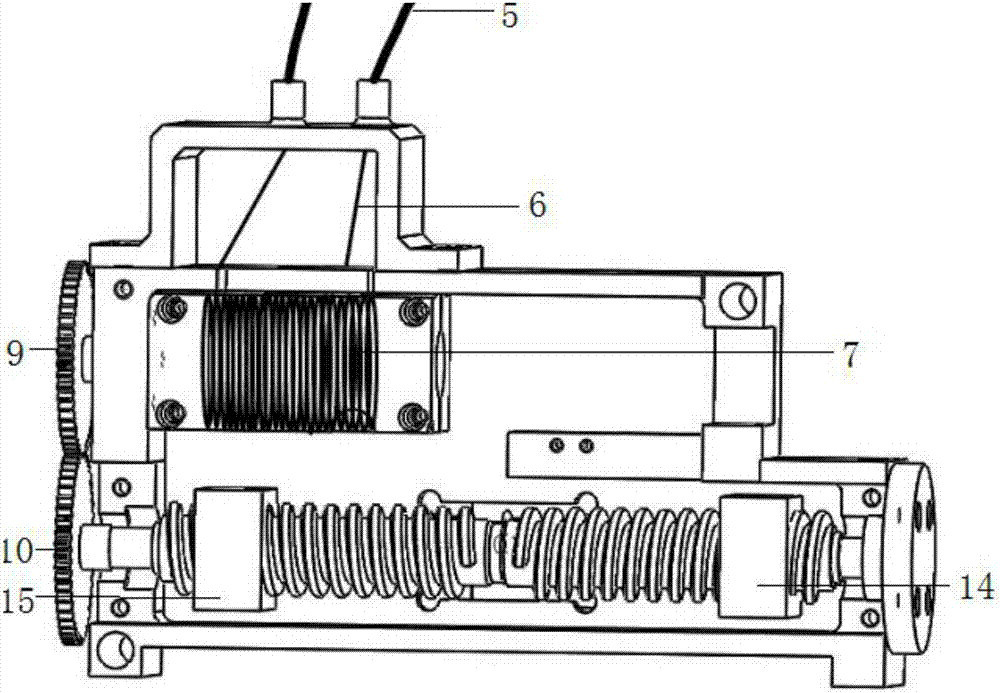
[0027] as attached figure 2 and 3 As shown, the actuator 3 includes a housing 8, a driving gear 9, a driven gear 10, a double-ended screw 11, a left-handed slider nut 14, a right-handed sli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More