

Force application-adjustable manipulator and robot using same
A technology of manipulators and manipulators, applied in the field of manipulators, can solve the problems of inability to absorb contact objects, high contact force requirements, and inconvenient use by production workers, and achieve good production requirements and a wide range of applications.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
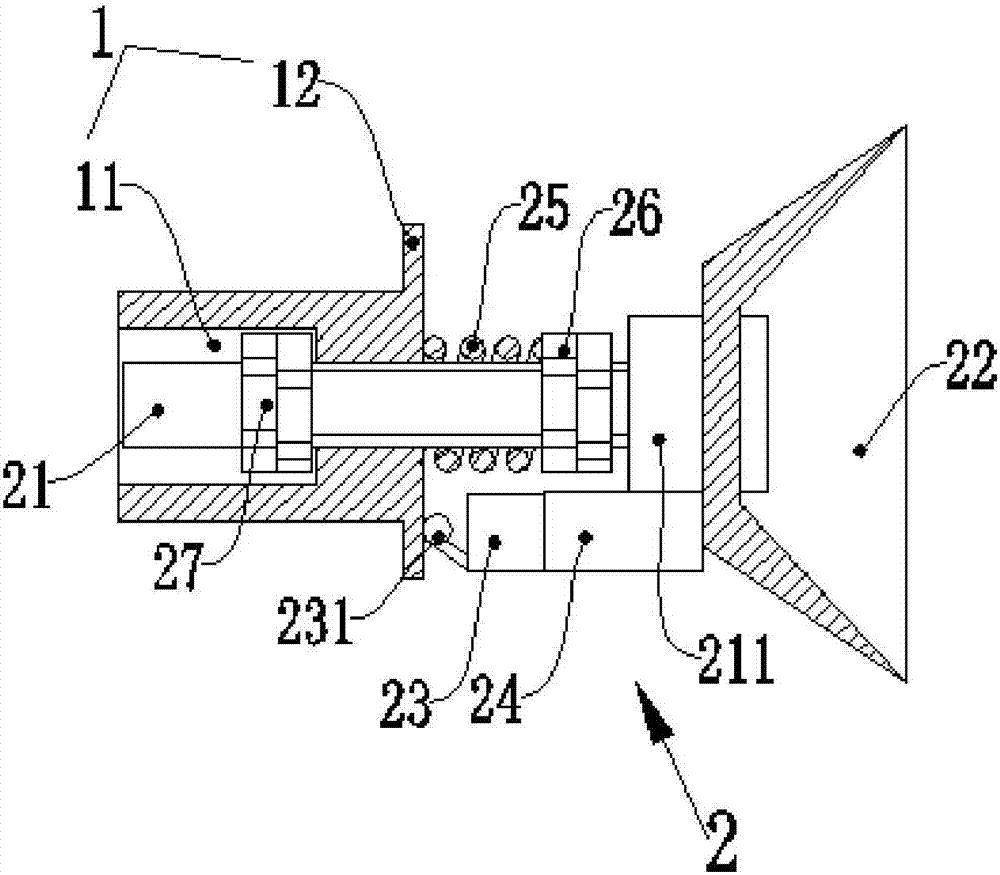
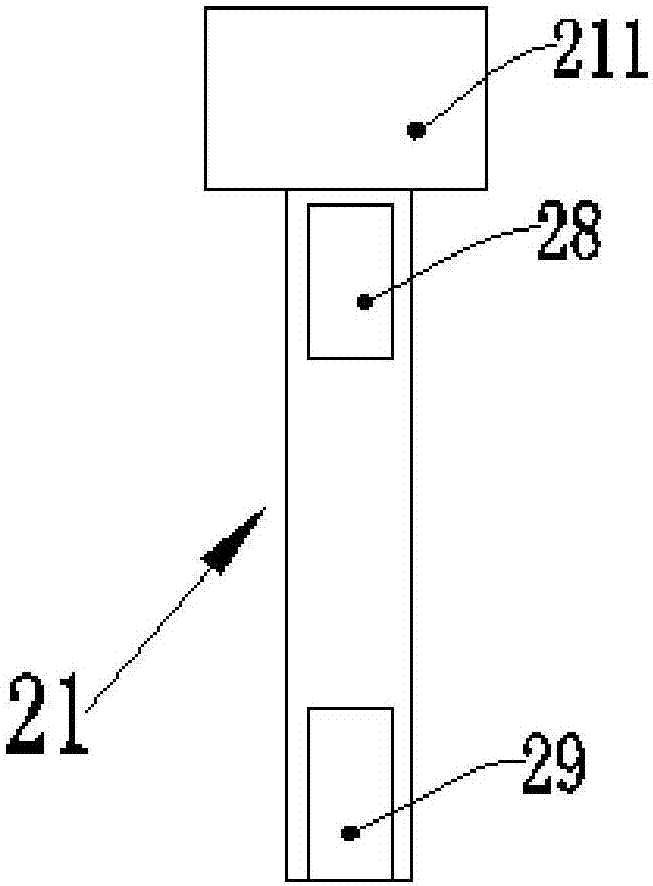
[0025] The manipulator with adjustable force of the present embodiment, such as figure 1 As shown, it includes a mechanical arm 1 and a mechanical wrist 2. The mechanical wrist 2 includes a wrist shaft 21 and a gripper 22. The gripper 22 is installed on one end of the wrist shaft 21, and the other end of the wrist shaft 21 is One end is movably connected with one end of the mechanical arm 1;
[0026] The mechanical arm 1 includes a trigger baffle 12, one side of the trigger baffle 12 is connected to one end of the mechanical arm 1; the mechanical wrist 2 also includes a trigger sensor 23, a sensor mount 24, and a force spring 25 and a force adjusting nut 26; the wrist shaft 21 includes a mounting portion 211, the mounting portion 211 is arranged at one end of the wrist shaft 21, the gripper 22 is d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More