Indoor positioning method and device for unmanned aerial vehicle
An unmanned aerial vehicle and indoor positioning technology, applied in the field of unmanned aerial vehicle indoor positioning methods and devices, can solve the problems of inaccurate positioning accuracy and high positioning cost, and achieve the effect of high-precision positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
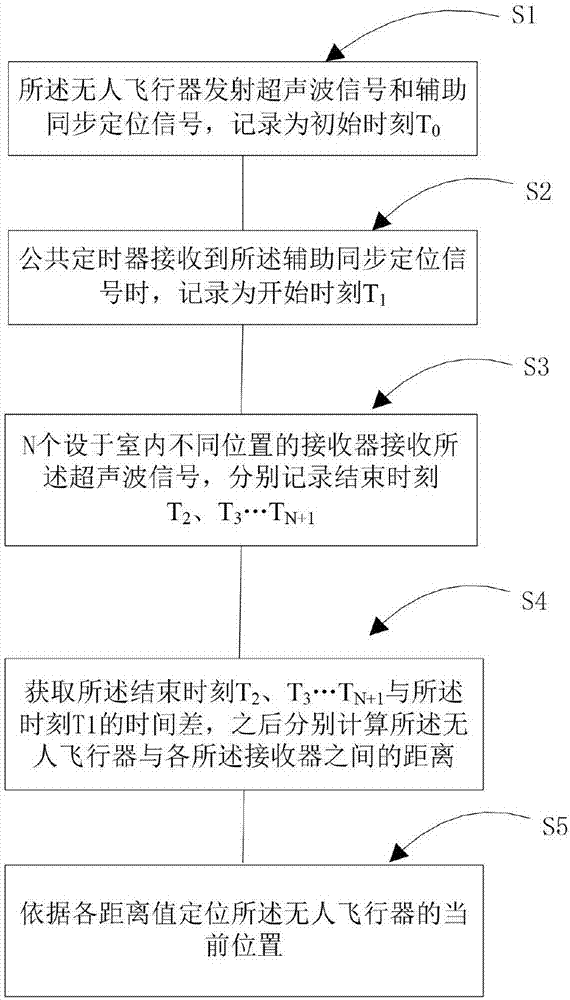
[0042] like figure 1 As shown, the present invention provides an indoor positioning method for an unmanned aerial vehicle, and the indoor positioning method for an unmanned aerial vehicle comprises the following steps:
[0043] The UAV in S1 transmits an ultrasonic signal and an auxiliary synchronous positioning signal, which is recorded as the initial time T 0 ;
[0044] S2 When the public timer receives the auxiliary synchronous positioning signal, record it as the start time T 1 ;
[0045]S3 N receivers arranged in different indoor positions receive the ultrasonic signal, and record the end time T respectively 2 , T 3 …T N+1 , where N is an integer greater than or equal to 3;
[0046] S4 Obtain the end time T 2 , T 3 …T N+1 with the moment T 1 time difference, and then respectively calculate the distance between the UAV and each of the receivers;
[0047] S5 locates the current position of the UAV according to each distance value.
[0048] The indoor positioning...
Embodiment approach 2
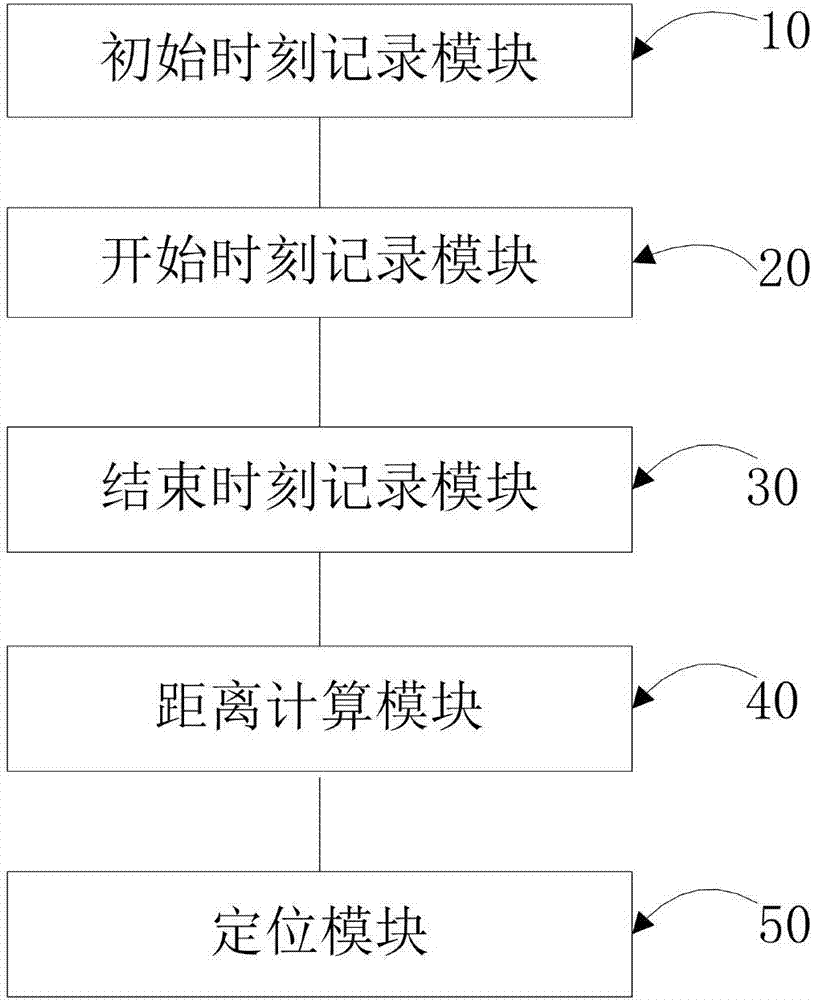
[0061] The present invention also provides an indoor positioning device for an unmanned aerial vehicle, the indoor positioning device for an unmanned aerial vehicle includes:
[0062] The initial moment recording module 10 is used for recording the initial moment T when the UAV transmits the ultrasonic signal and the auxiliary synchronous positioning signal 0 ;
[0063] The start time recording module 20 is used for recording the start time T when the public timer receives the auxiliary synchronous positioning signal 1 ;
[0064] The end time recording module 30 is used for receiving the ultrasonic signals by N receivers arranged at different positions in the room, and records the end time T respectively. 2 , T 3 …T N+1 ;
[0065] A distance calculation module 40, configured to obtain the end time T 2 , T 3 …T N+1 with the moment T 1 time difference, and then respectively calculate the distance between the UAV and each of the receivers;
[0066] The positioning modul...
Embodiment 1
[0075] Specifically, the modified embodiment 1 of the present invention is modified on the basis of the above-mentioned embodiments 1 and 2. The proposed indoor positioning device includes an unmanned aerial vehicle transmitting part and a receiving part arranged at different positions indoors. The transmitting part mainly includes: Infrared transmitter module, ultrasonic transmitter module, LED module, serial debugging module, delay module and 915 MHz wireless transmission module (referred to as RF915 digital transmission module). and their respective communication interfaces.
[0076] The receiving part mainly includes: infrared receiving module, ultrasonic receiving module, LED module, timer module, positioning algorithm module, Ublox protocol module, serial debugging module, delay module and RF915 data transmission module. and their corresponding interfaces.
[0077] In the launch part of the indoor positioning device for unmanned aircraft proposed by the present inventio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More