

Stair-climbing and obstacle-crossing robot
A robot and ladder-climbing technology, applied in the field of robotics, can solve problems such as unsmooth adjustment, slow obstacle surmounting speed, complex structure, etc., and achieve the effects of fast speed, strong obstacle surmounting ability, and stable and firm support
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Embodiments of the present invention will be further described below in conjunction with accompanying drawings:
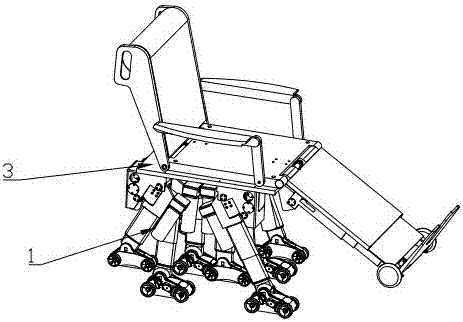
[0034] As shown in the figure, a ladder-climbing obstacle-surpassing robot includes a frame 3 and a walking system, a seat system and an operating system arranged on the frame 3 .
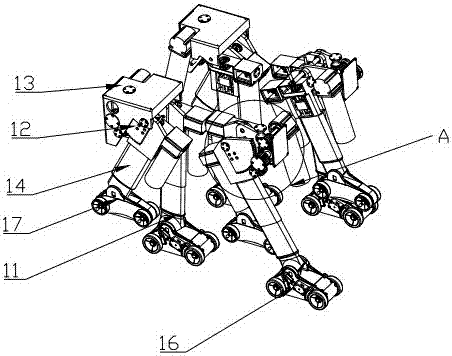
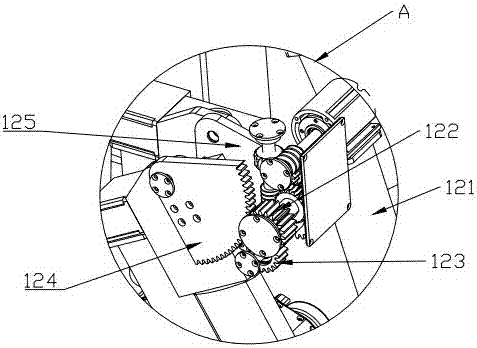
[0035] The walking system includes four groups of walking support feet 1, each group of walking support feet 1 includes a first telescopic support cylinder 11, a second telescopic support cylinder 14, a second drive transmission mechanism 12 and a connecting piece 13, and four groups of walking support The feet 1 are respectively fixed at the four corners of the bottom of the frame 4 through connectors 13. The first telescopic support cylinder 11 and the second telescopic support cylinder 14 are hinged on the connectors 13, and form the first telescopic support cylinder 12 through the second drive transmission mechanism 12. The telescopic support cylinder 11 and the second telesc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More