

Autonomous planning method for nuclear radiation detection path of mobile robot in unfamiliar indoor scene
A mobile robot and global path planning technology, applied in the field of nuclear radiation detection, to achieve the effect of full coverage and real-time obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The autonomous planning method of nuclear radiation detection path for mobile robots in unfamiliar indoor scenes is applied to mobile robots, which are equipped with odometer, acceleration sensor, laser ranging radar, camera, radiation detector and computer; odometer, acceleration sensor , the laser ranging radar, the camera and the radiation detector are electrically connected or communicated with the computer respectively.
[0023] The independent planning method of nuclear radiation detection path is as follows:
[0024] S01, get the environment map:
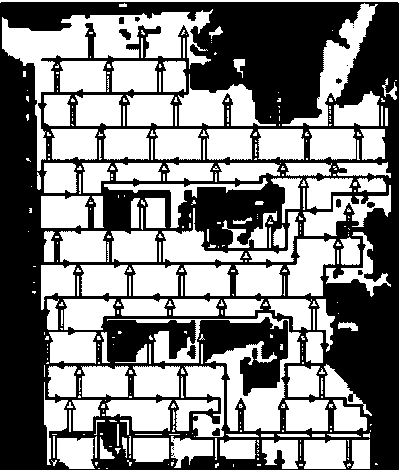
[0025] After the mobile robot enters the indoor area to be tested, it drives around the indoor boundary, comprehensively obtains environmental information through the odometer, acceleration sensor, laser ranging radar and camera, and the computer performs multi-sensor data fusion through the extended Kalman filter algorithm to obtain the environmental information. Map, calculate the current position coordinates, attit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More