

Method for controlling welding path of welding robot
A welding robot and welding path technology, applied in welding equipment, welding accessories, program control manipulators, etc., can solve problems such as poor weld quality and poor welding uniformity, and achieve low cost, high reliability, and simple software design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The invention provides a welding robot system and a welding path control method with simple structure, low cost, simple control mode and high reliability:
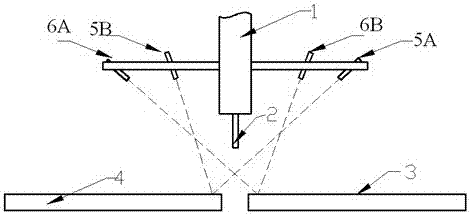
[0024] A welding robot includes a mechanical arm, a cage fixed at the end 1 of the mechanical arm, a welding torch 2 mounted on the end 1 of the mechanical arm, and an error correction system mounted on the cage. According to the instructions of the control system, the mechanical arm Drive the welding torch 2 above the seam and move along a predetermined path to complete the welding of 3 / 4 of the two plates;
[0025] The error correction system includes first and second detection components 5 / 6 and a filter;
[0026] The detection parts 5 / 6 include energy emitters 5A\6A and energy detectors 5B\6B respectively located on one side and the other side of the welding torch 2; and, the energy emitters 5A of the first detection part and the The energy detector 6B is located on the same side of the welding torch 2;
[002...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More