

Genetic-algorithm-based active removing task planning method for space debris
A technology for space debris and mission planning, applied in genetic rules, calculations, genetic models, etc., can solve the problems of encoding methods and cross-space debris active clearance task planning falling into local optimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0083] The task planning method for the active removal of space debris based on the genetic algorithm includes the following steps:
[0084] Step 1, Encoding:
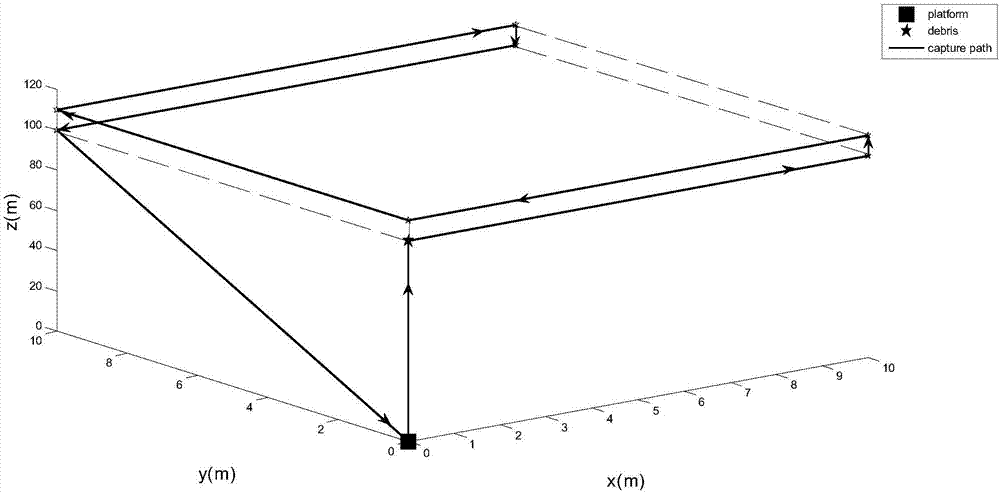
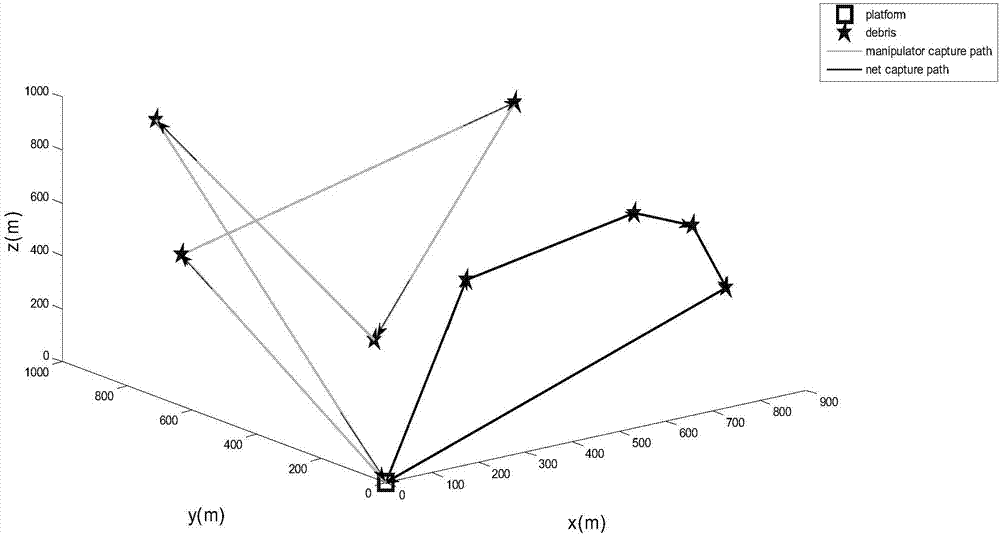
[0085] The debris removal task considers using a robotic arm to grab debris, and the robotic arm is triggered from the platform to remove debris;
[0086] Let the number of fragments be n-1; consider the platform as the first city, and the fragments as the second to n cities; use the traversal order of the cities as the code, that is (z 1 ,z 2 ,...,z n ) is a full permutation of {1,2,...,n}, where z 1 ,z 2 ,...,z n Indicates the order of traversing all cities each time, the order z of traversing all cities each time 1 ,z 2 ,...,z n As an encoding; there are (n-1)! A possibility,! Represents factorial; each possible sequence code is regarded as an individual, and all possible sequence codes are combined as the initial population;
[0087] Step 2. Initialize the group:
[0088] According to the relative posit...
specific Embodiment approach 2
[0105] The specific process of step 4 of this embodiment includes the following steps:
[0106] Step 4.1, first calculate the sum of the fitness of all individuals in the calculation population Where f(j) is the fitness of individual j;
[0107] Step 4.2, calculate the probability that each individual is inherited into the next generation population:
[0108]
[0109] Step 4.3, and calculate the cumulative probability of each individual:
[0110]
[0111] Step 4.4, the next step is to generate a uniformly distributed pseudo-random number r in the [0,1] interval;
[0112] Step 4.5, if r1 , select individual 1; otherwise, select individual i such that: q i ≤r≤q i+1 established;
[0113] Step 4.6, repeat steps 4.4 and 4.5 for a total of M times to complete the selection operation, and obtain the intermediate population.
[0114] Other steps and parameters are the same as those in the first embodiment.
specific Embodiment approach 3
[0115] T1=1000 described in this embodiment. When there are less than 12 space debris, only need to set T1 to 1000 can make the overall performance index reach the optimum, and the time-consuming and fast convergence speed.
[0116] Other steps and parameters are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More