

Deep learning control planning method of movement routes of robot in intelligent environment
A technology of robot movement and deep learning, applied in the direction of vehicle position/route/height control, non-electric variable control, control/regulation system, etc., can solve the problem of fast search speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0082] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
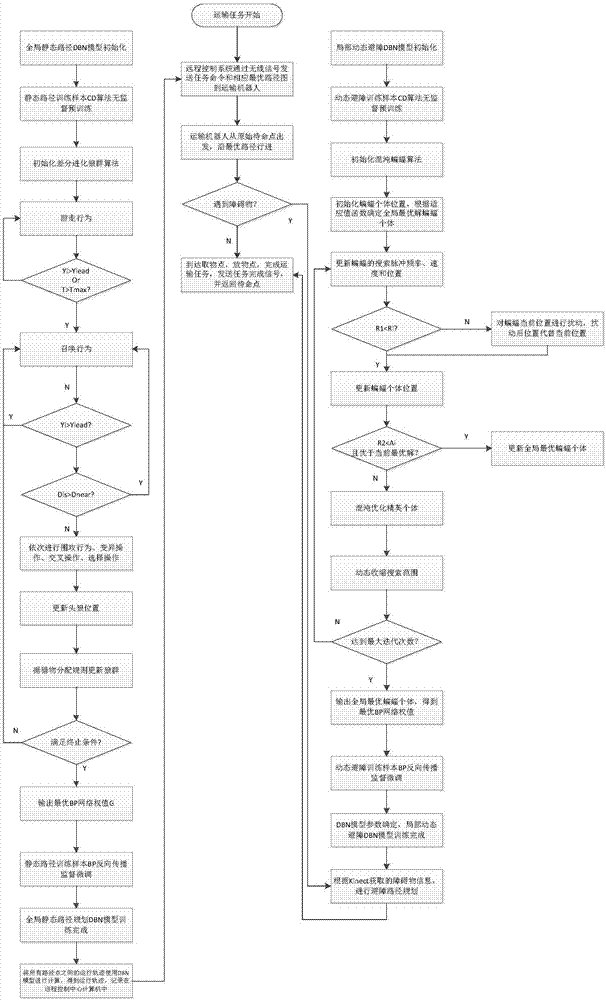
[0083] Such as figure 1 As shown, a robot movement path deep learning control planning method in an intelligent environment includes the following steps:
[0084] Step 1: Construct a three-dimensional coordinate system of the global map for the carrying area of the carrier robot, and obtain the coordinates of the walkable area under the three-dimensional coordinate system of the global map;
[0085] The ground center point of the carrying area is the origin, the due east direction is the X axis, the true north direction is the Y axis, and the vertical ground direction is the Z axis;
[0086] The carrying area of the carrying robot is all the floor connecting areas in a building, and the walkable area refers to the area where obstacles in the building are deleted from all the floor connecting areas;
[0087] In the three-dimensional coordinate syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More