

Energy recovery device and method for leg shock absorbing mechanism of field foot-type robot
A technology of energy recovery device and shock absorbing mechanism, which is applied in the direction of electromechanical devices, circuit devices, battery circuit devices, etc., to achieve the effect of improving the smooth performance of walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with the accompanying drawings.
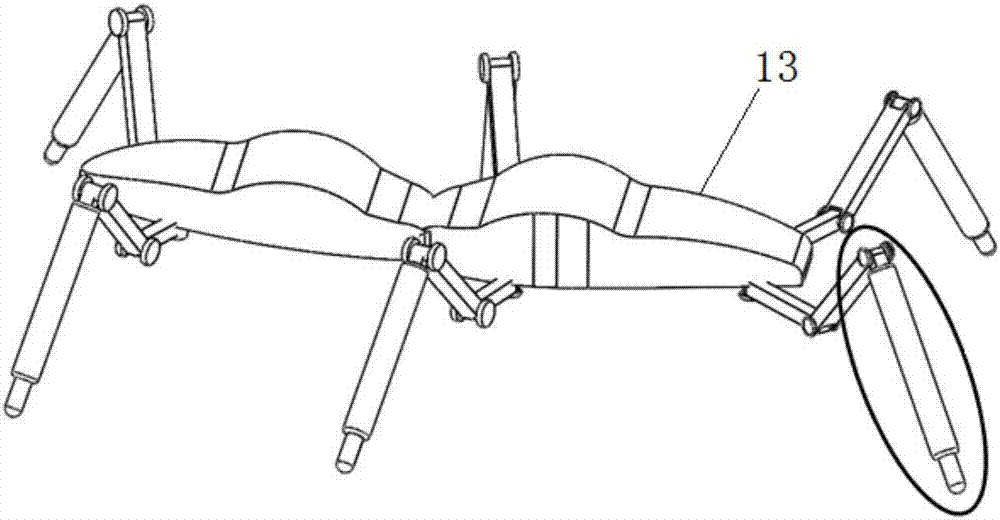
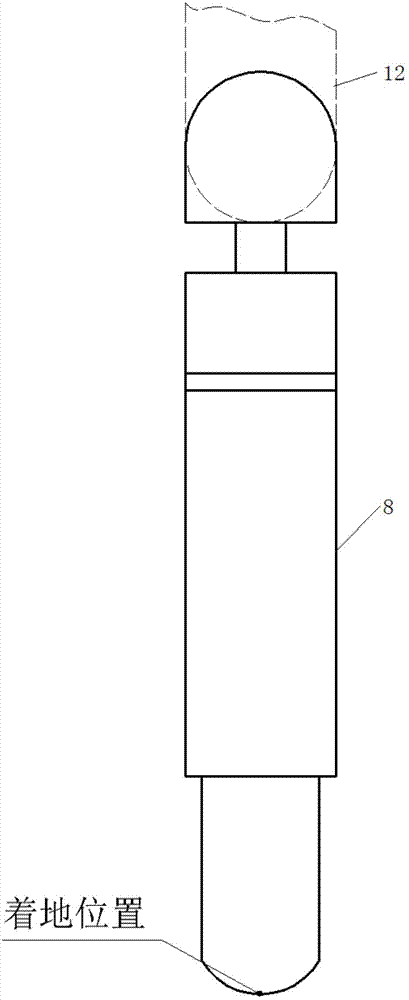
[0032] see figure 1 and figure 2 , figure 1 It is a schematic diagram of the legged robot 13, wherein the ellipse is the energy recovery device of the present invention. which is figure 2 It is an outline drawing of the energy recovery device of the present invention, and the present invention improves the leg mechanical mechanism of the existing bionic hexapod robot.
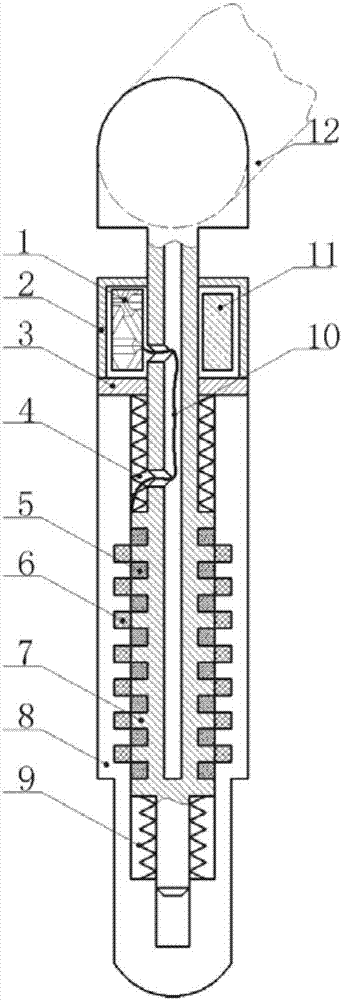
[0033] see figure 2 and image 3 , the present invention includes a winding coil 6, a linear generator stator core 8 and a linear generator hollow shaft 7, the linear generator hollow shaft 7 is installed in the inner cavity of the linear generator stator core 8, and the linear generator There is an air gap between the hollow shaft 7 and the stator core 8 of the linear generator, grooves are opened on the inner surface of the stator core 8 of the linear generator, the winding coil 6 is wound in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More