

Piezoelectric drive type two-degree-of-freedom high-precision microoperation clamp
A piezoelectric drive and micro-operation technology, which is applied in metal processing, metal processing equipment, manufacturing tools, etc., can solve the problems that cannot meet the requirements of PMOF rotation at an angle, cannot guarantee the precise positioning of PMOF, and is not suitable for mass production. Achieve the effects of measurement and real-time feedback, compact structure, and low production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
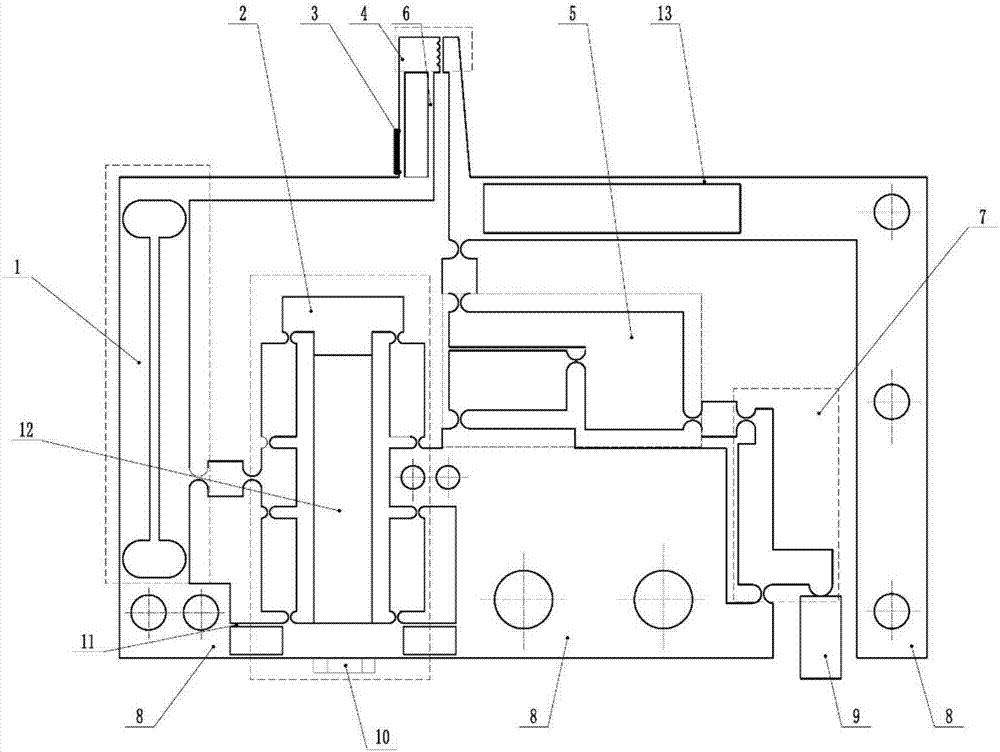
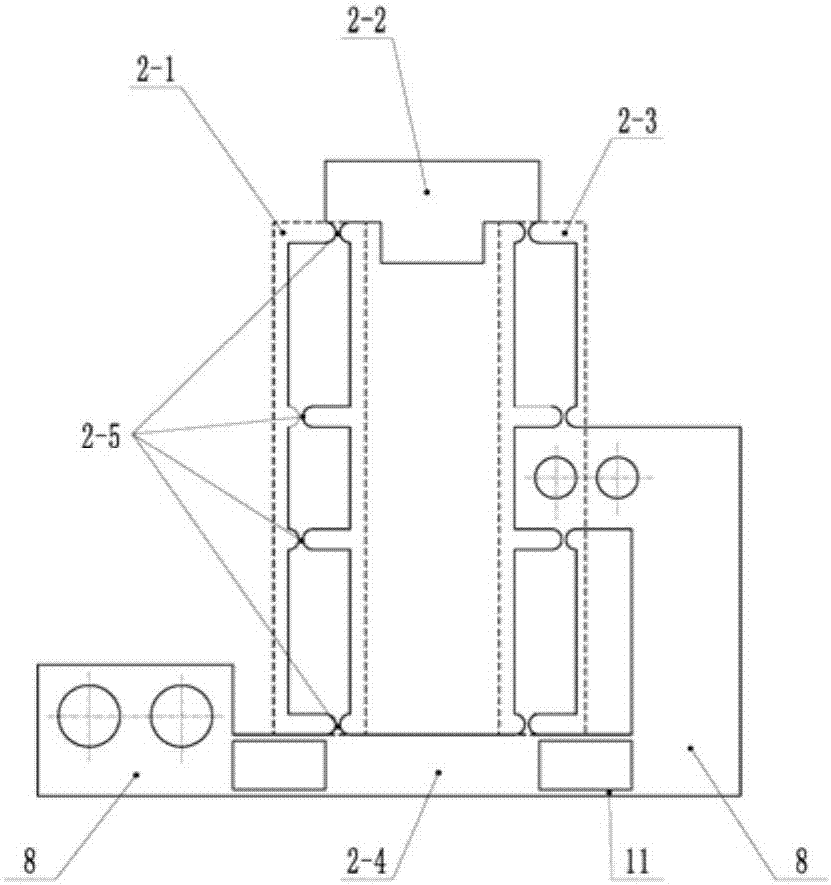
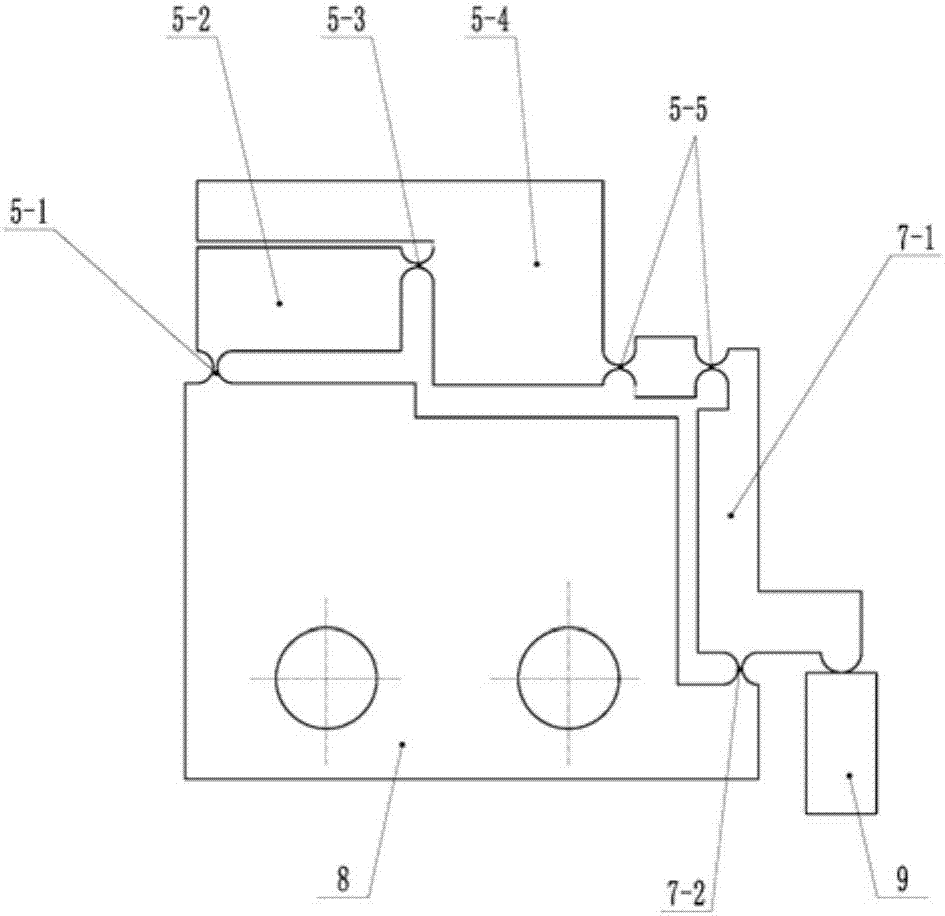
[0022] see Figure 1 ~ Figure 4 , the embodiment of the present invention protects a piezoelectric-driven two-degree-of-freedom high-precision micro-operation gripper, which is integrally formed by wire cutting of a plate, and includes a bridge-type displacement amplification mechanism 2 and an SR displacement amplification mechanism 5, The lever amplifying mechanism 7 and the base body 8, the bridge type displacement amplifying mechanism 2, the SR displacement amplifying mechanism 5, and the lever amplifying mechanism 7 are distributed on both sides of the center line, which is an asymmetric structure.
[0023] The bridge-type displacement amplifying mechanism 2 is distributed on the left side of the mechanism, and is provided with two movab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More