

Electric ocean wave active compensation embarkation system and control method thereof
A technology of active compensation and motion control system, applied in equipment for reducing ship motion, passenger handling equipment, reducing ship motion, etc., can solve problems affecting the safety of boarding personnel and less freedom, and achieve fast start-up speed and low cost , the effect of low power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
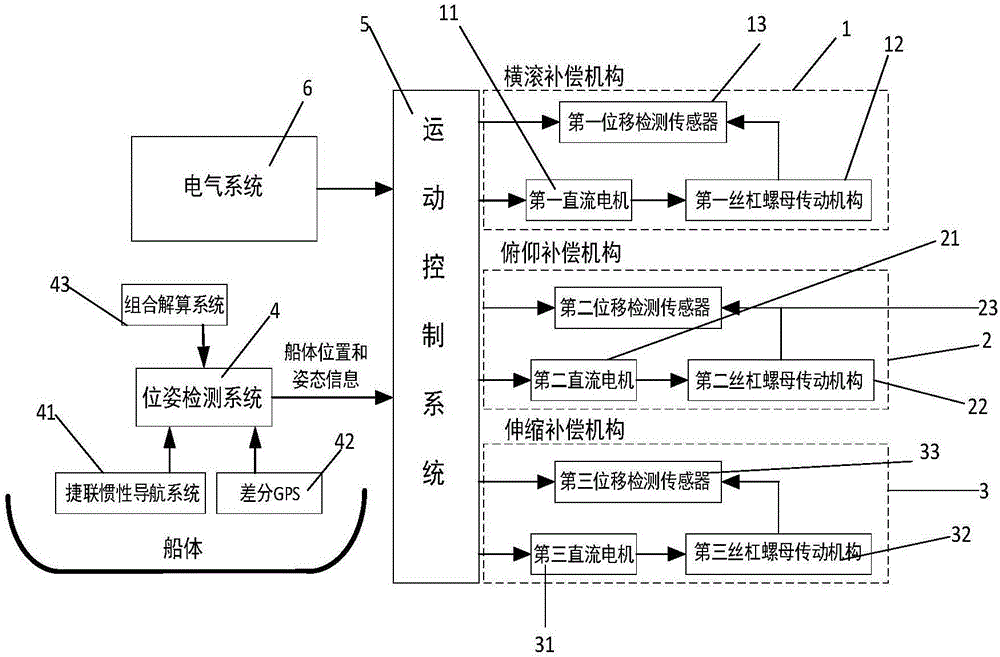
[0059] An electrically powered sea wave active compensation boarding system such as figure 1 As shown, it includes a roll compensation mechanism 1, a pitch compensation mechanism 2, a telescopic compensation mechanism 3, a pose detection system 4, a motion control system 5 and an electrical system 6; the claimed roll compensation mechanism 1 includes a first DC motor 11, a A screw nut transmission mechanism 12 and a first displacement detection sensor 13; the pitch compensation mechanism 2 includes a second DC motor 21, a second lead screw nut transmission mechanism 22 and a second displacement detection sensor 23; the telescopic compensation mechanism 3 Including a third DC motor 31, a third lead screw nut transmission mechanism 32 and a third displacement detection sensor 33; the pose detection system 4 includes a strapdown inertial navigation system 41, a differential GPS42 and a combined solution system 43; a telescopic compensation mechanism 3 is placed on the pitch compe...
specific Embodiment 2
[0068] The electric wave active compensation boarding method is formulated according to the small operation and maintenance ship in low sea conditions. When the sea conditions are low, the waves have strong one-way, the bow of the operation and maintenance ship faces the waves, and the main propulsion of the ship The propeller and lateral thruster can control the course and horizontal position of the ship, while the ship's roll and pitch attitudes, as well as the ship's heave, need to be compensated by the active wave compensation boarding system.
[0069] The roll compensation, pitch compensation and expansion and contraction compensation schemes adopted in the present invention are formulated according to small operation and maintenance ships in low sea conditions. Under low sea conditions, small operation and maintenance ships have the characteristics of small size, flexibility and convenient work. They can move personnel and equipment for wind turbine platforms and ships. ...
specific Embodiment 3
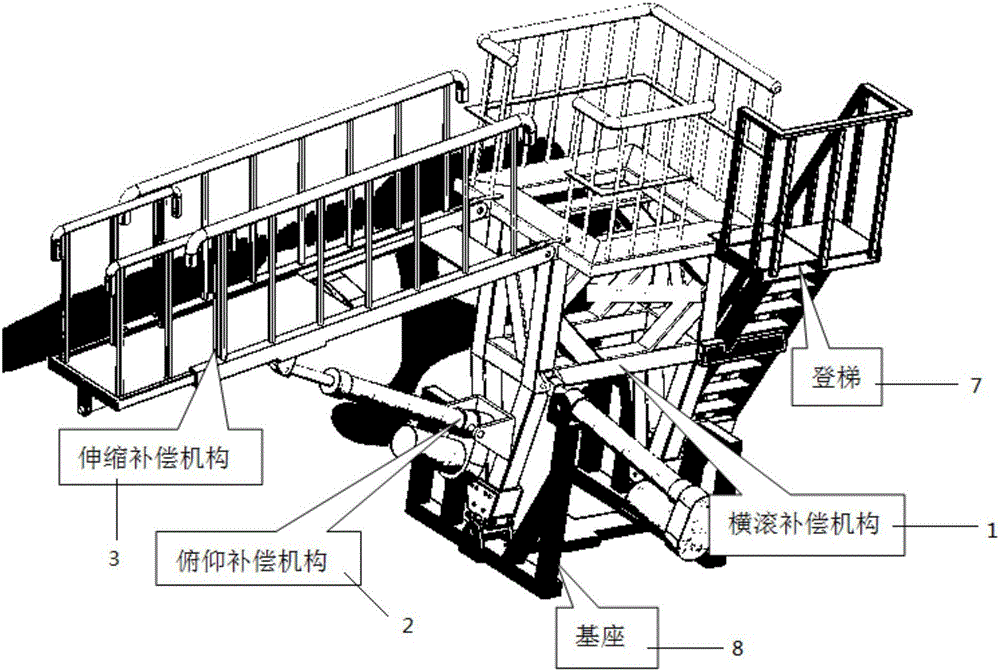
[0070] The electric wave active compensation boarding system, such as figure 2 As shown, it also includes a climbing ladder 7 and a base 8. The climbing ladder 7 is connected to the roll compensation mechanism 1 and has a certain gap with the deck. The roll compensation mechanism 1 and the pitch compensation mechanism 2 are connected to the base 8. The base 8 on deck.
[0071] The present invention is composed of a roll compensation mechanism 1, a pitch compensation mechanism 2, a telescopic compensation mechanism 3, a base 8 and a climbing ladder 7: the climbing ladder 7 is a mechanism for maintenance personnel to board the gallery bridge from the deck, and the climbing ladder 7 is fixedly connected to There is a certain gap between the roll compensation mechanism 1 and the deck; the base 8 is fixedly connected to the deck, and the motor of the actuator of the roll compensation mechanism 1 is placed on the base; the roll compensation mechanism 1 is placed on the base, using ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More