

Human body attitude calculation method based on quaternion and Kalman filtering
A Kalman filter and human body posture technology, which is applied in ground navigation, navigation through speed/acceleration measurement, etc., can solve problems such as insufficient stability and reliability, complex calculation, and failure to achieve filtering effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
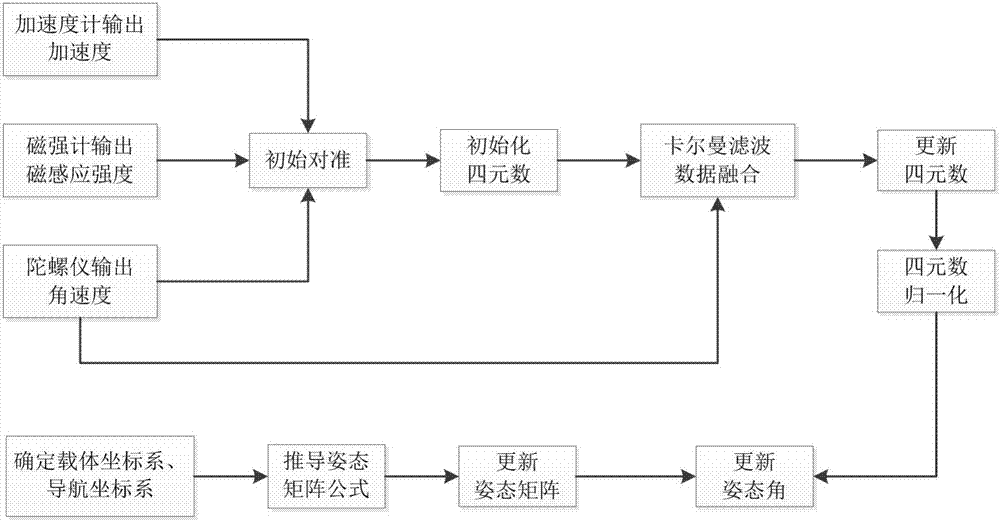
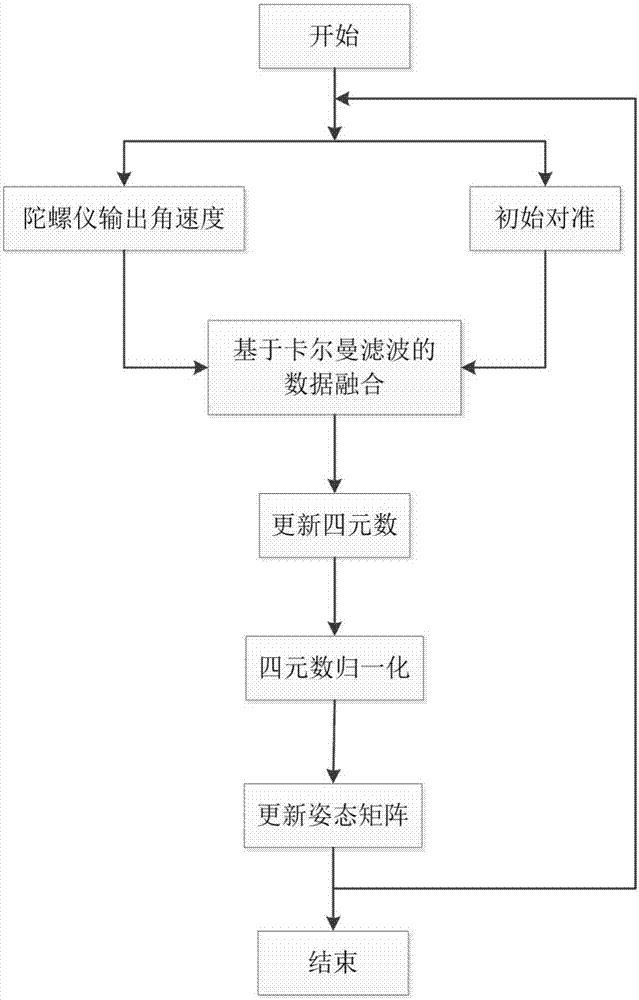
[0075] The present invention provides a human body attitude calculation method based on quaternion and Kalman filter. The whole calculation process uses quaternion to represent the human body attitude. In the calculation process, the accelerometer, The data collected by the gyroscope and the magnetometer are filtered, and the posture data are fused to obtain the final human body posture data.
[0076] combine figure 1 , figure 2 , the present invention is based on the quaternion and Kalman filter human body posture solution method, the specific implementation method is as follows:
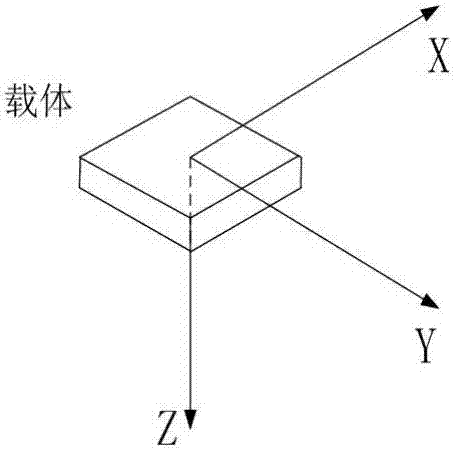
[0077] Step 1, determine the carrier coordinate system and the navigation coordinate system, and determine the attitude matrix according to the determined coordinate system;
[0078] In order to obtain the posture of the human body, the carrier coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More