

Multi-constraint locus planning method of spatial free floating mechanical arm
A trajectory planning and robotic arm technology, applied in adaptive control, instruments, calculation models, etc., can solve problems such as failure to fully consider the joint capacity of the robotic arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] Below in conjunction with specific embodiment the present invention is described in further detail, described is explanation of the present invention rather than limitation.
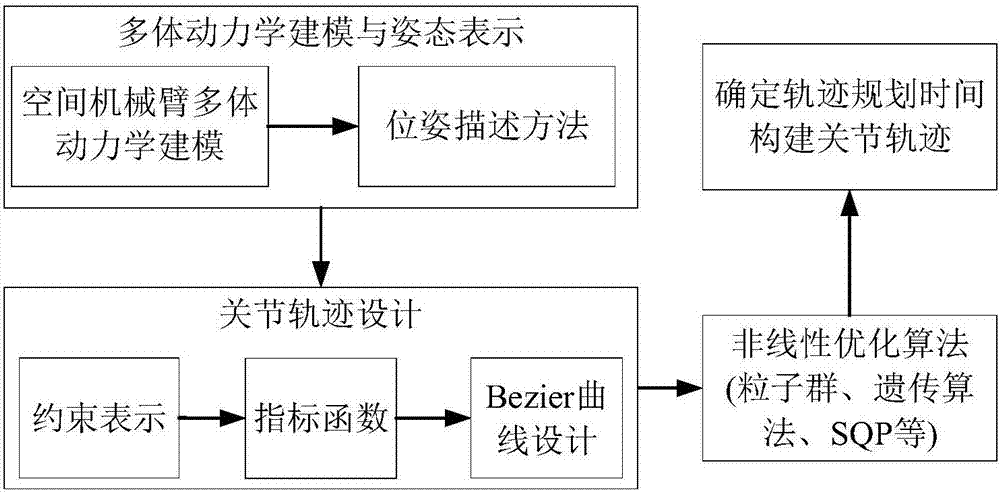
[0088] The present invention proposes and designs a multi-constraint trajectory planning algorithm based on Bessel (Bézier) curves for space free-floating manipulators, which meets the needs of space manipulators to autonomously capture non-cooperative targets, and comprehensively considers dynamic coupling, Capture timing, manipulator driving ability constraints, and trajectory planning algorithm with multiple optimization indicators, so as to realize the autonomous capture task of non-cooperative targets in space.
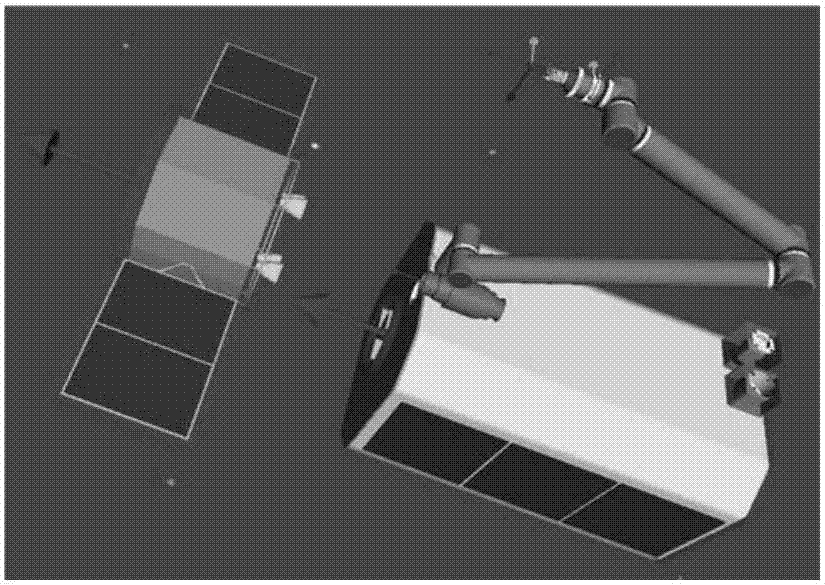
[0089] The space robot consists of a manipulator system composed of multiple single-degree-of-freedom joints and a base equipped with the manipulator system. Assuming that the manipulator has n joints, the space robot system has n+1 movable parts. The degrees of freedom of motion are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More