

Quadrotor autonomous ship landing method based on saturated adaptive sliding mode control
An adaptive sliding mode and four-rotor technology, which is applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as input saturation without consideration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0125] Below each part design method in the present invention is further described:
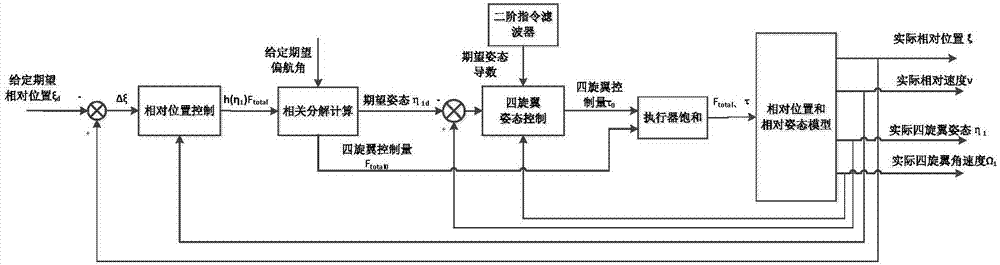
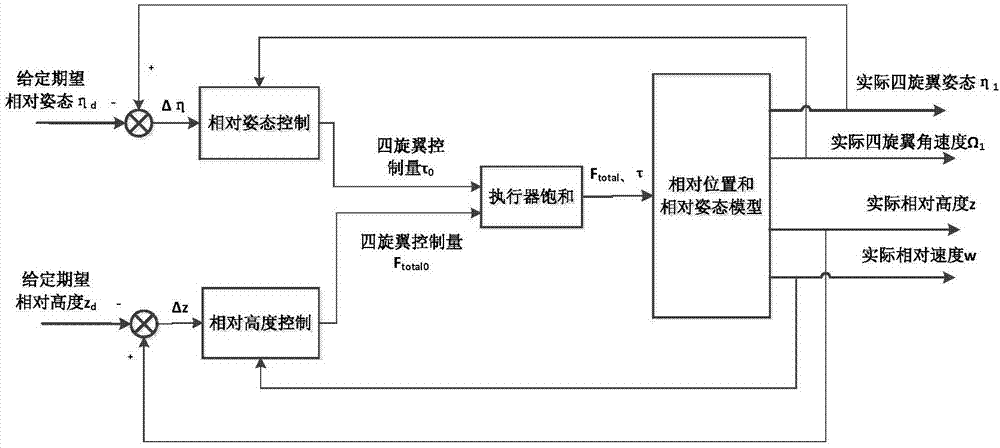
[0126] The present invention "a four-rotor autonomous landing method based on saturation adaptive sliding mode control", the specific steps are as follows:
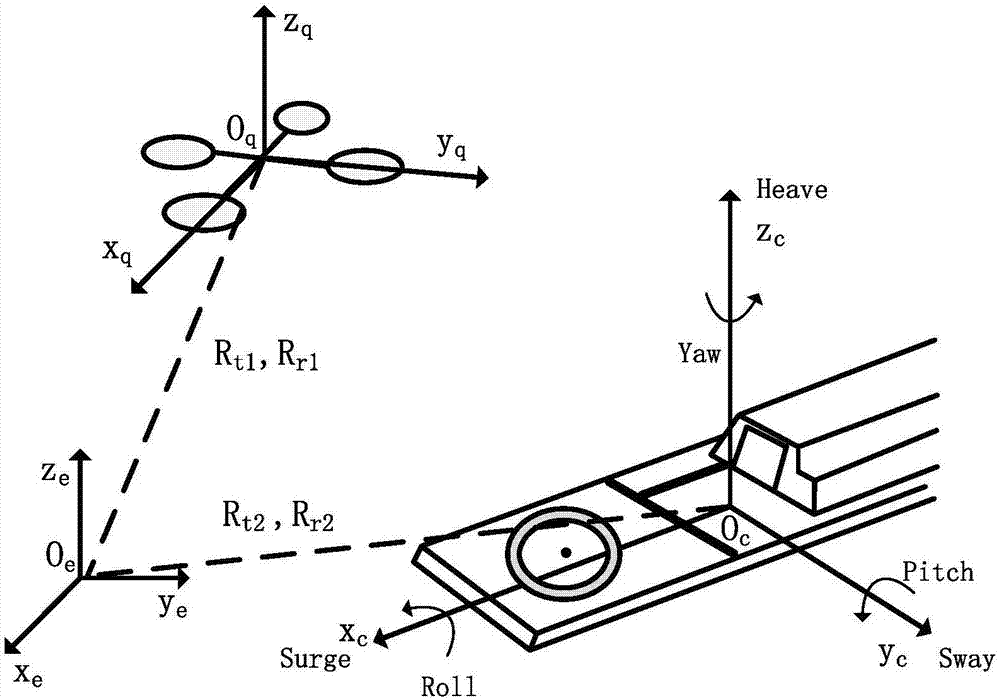
[0127] Step 1: Establish the kinematics and dynamics model
[0128] Through the six-degree-of-freedom model of the quadrotor and the unmanned ship, after transformation, the relative kinematics and relative dynamics models are established.
[0129]
[0130]
[0131] d 1 and d 2 Expressed as
[0132]
[0133] Among them, ξ=ξ 1 -ξ 2 =[x,y,z] T and η=η 1 -η 2 yes The relative position and relative attitude in the coordinate system, and yes Relative velocity and relative angular velocity in the coordinate system, h(η 1 ) is the matrix the last column of the , and is the aerodynamic friction coefficient matrix of the quadrotor. d 1 and d 2 is bounded, and its unknown bound is expressed as and ΔF total...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More