

A space robot derotation and coordinated control method after capturing a target
A space robot and coordinated control technology, applied in attitude control, motor vehicles, aircraft, etc., can solve the problem that there are few studies on derotation motion planning, and achieve the effect of eliminating the spin motion of the target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
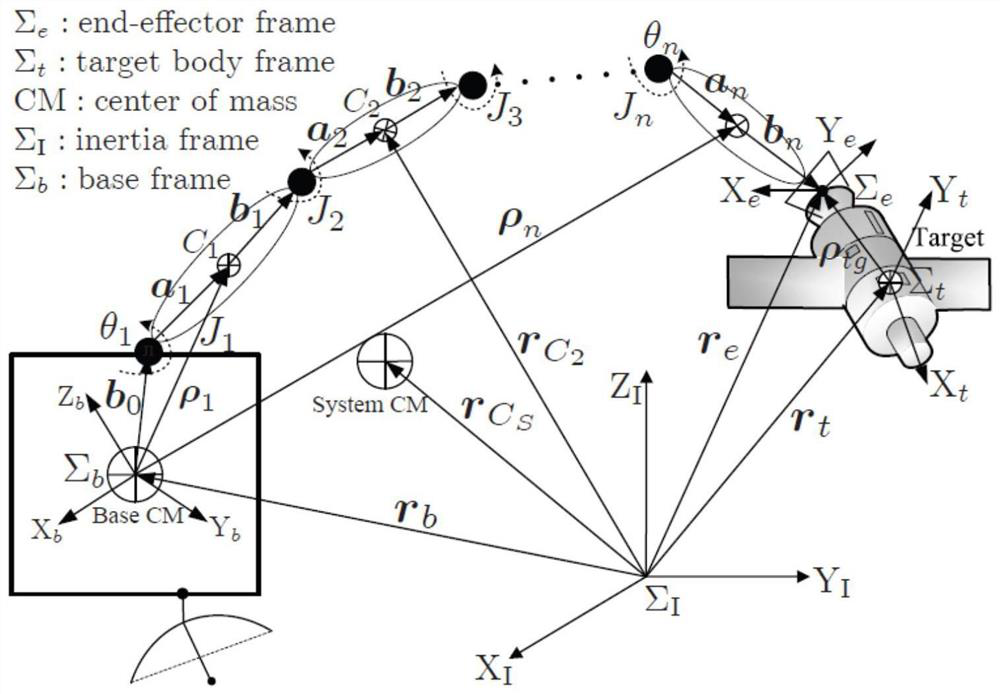
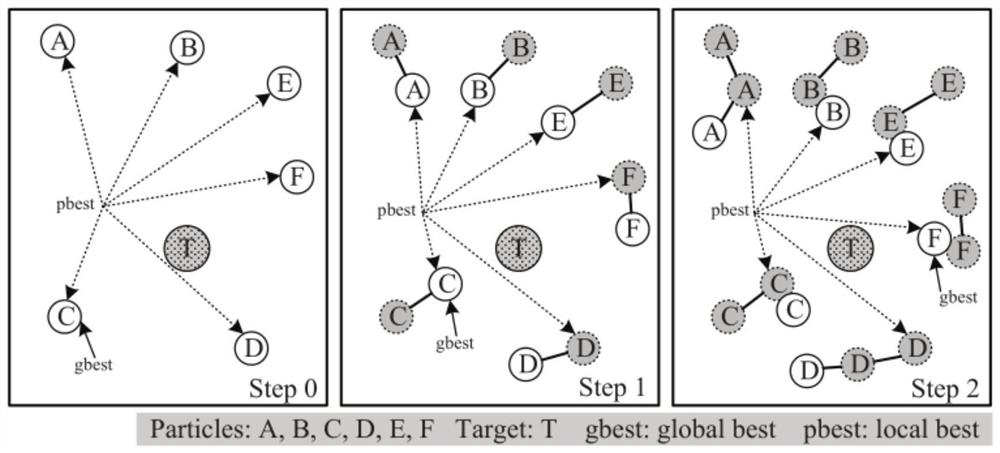
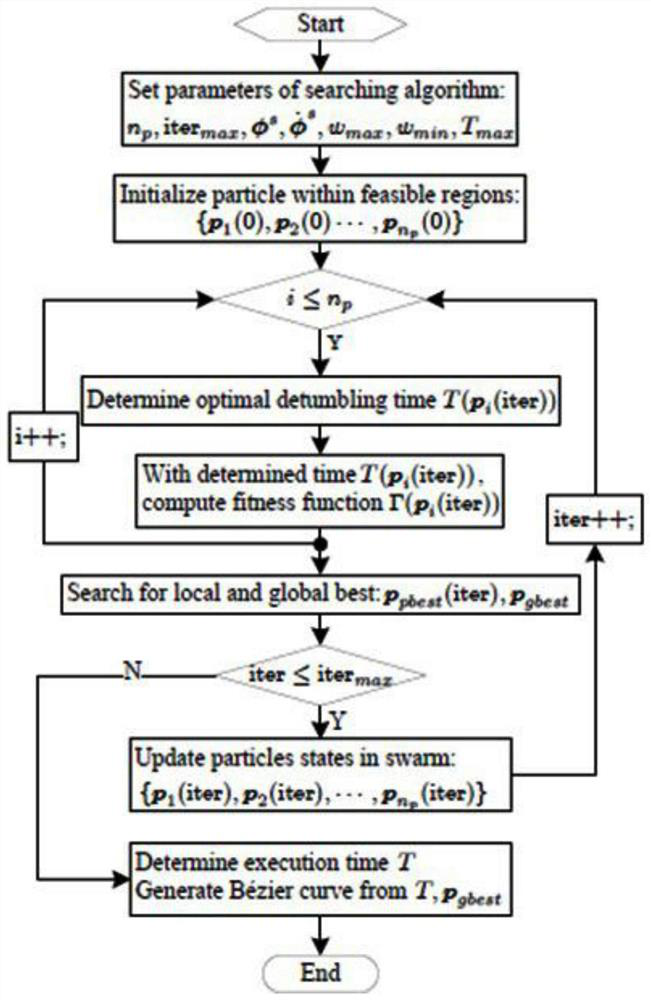
[0027] Based on the particle swarm optimization algorithm, the invention proposes a derotation and coordination control method after the space robot captures the target. The reason for choosing a kinematically redundant manipulator is that it has infinitely many solutions, which can be exploited to satisfy additional constraints. First, the dynamic equation of the combination of the robot and the target after capture is established; then, the trajectory of the capture point on the target after capture is planned using the Bezier curve; in addition, the particle swarm optimization with adaptive inertia weights is used The algorithm searches for the optimal derotation time and the pose of the target at the final moment, and generates the reference derotation trajectory of the end of the manipulator. Finally, a coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More