

Hexapod walker based on four-degree-of-freedom mechanism legs
A degree of freedom, walker technology, applied in the field of robotics, can solve the problems of complex control, large self-weight/load ratio, low self-weight/load ratio, etc., and achieve the effect of good assembly process, large bearing capacity, and strong obstacle crossing ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
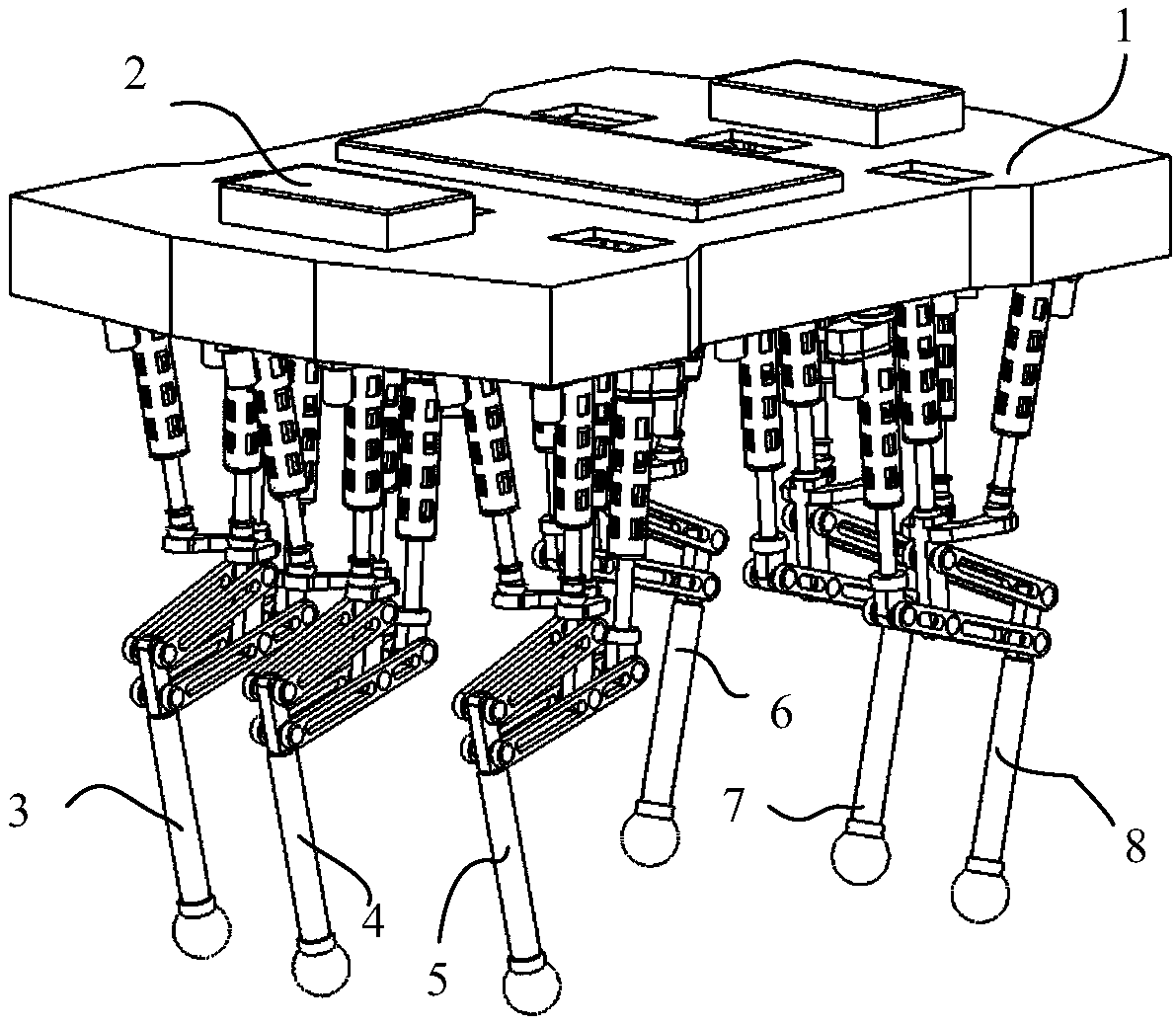
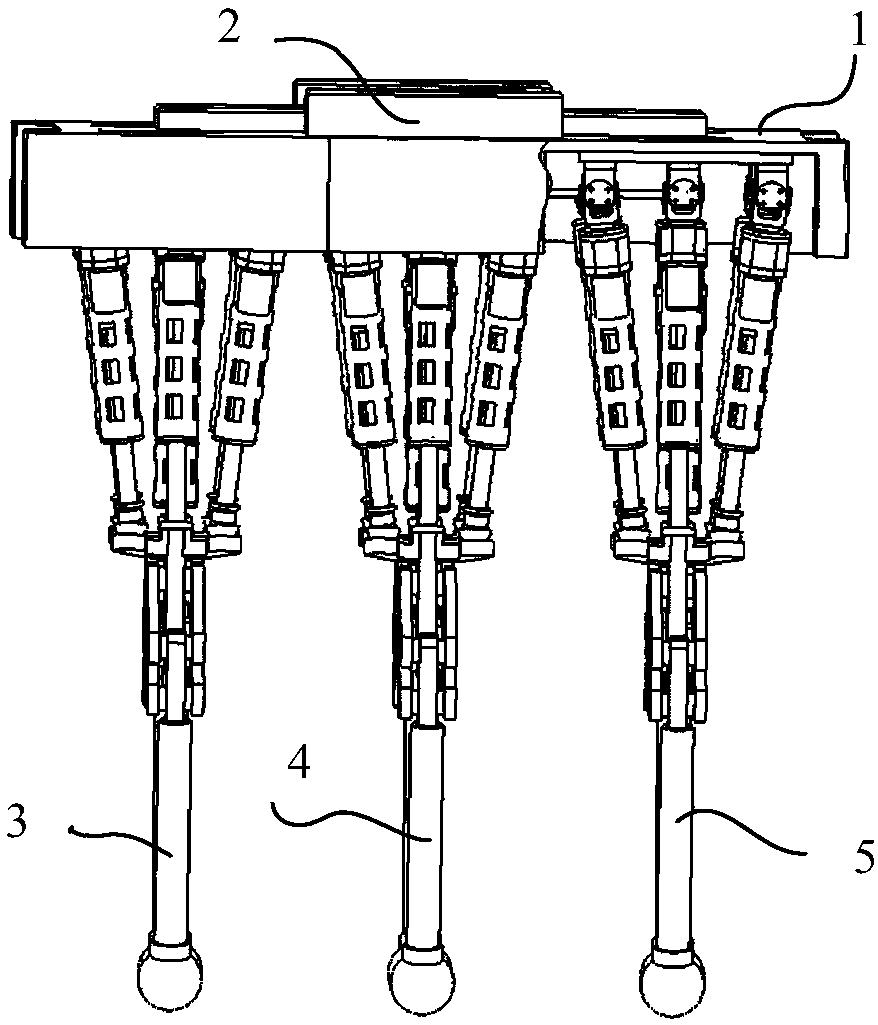
[0014] exist figure 1 with figure 2 In the schematic diagram of the hexapod walker based on the four-degree-of-freedom mechanism legs shown, the electrical unit 2 is arranged on the top of the frame 1, and the six four-degree-of-freedom mechanical legs 3, 4, 5, 6, 7, and 8 with the same structure pass through the triangular The connecting plate is fixedly connected with the frame; the frame is provided with bolt holes, weight-reducing holes and positioning holes for connection with the mechanical legs and electrical units and lightening the weight;
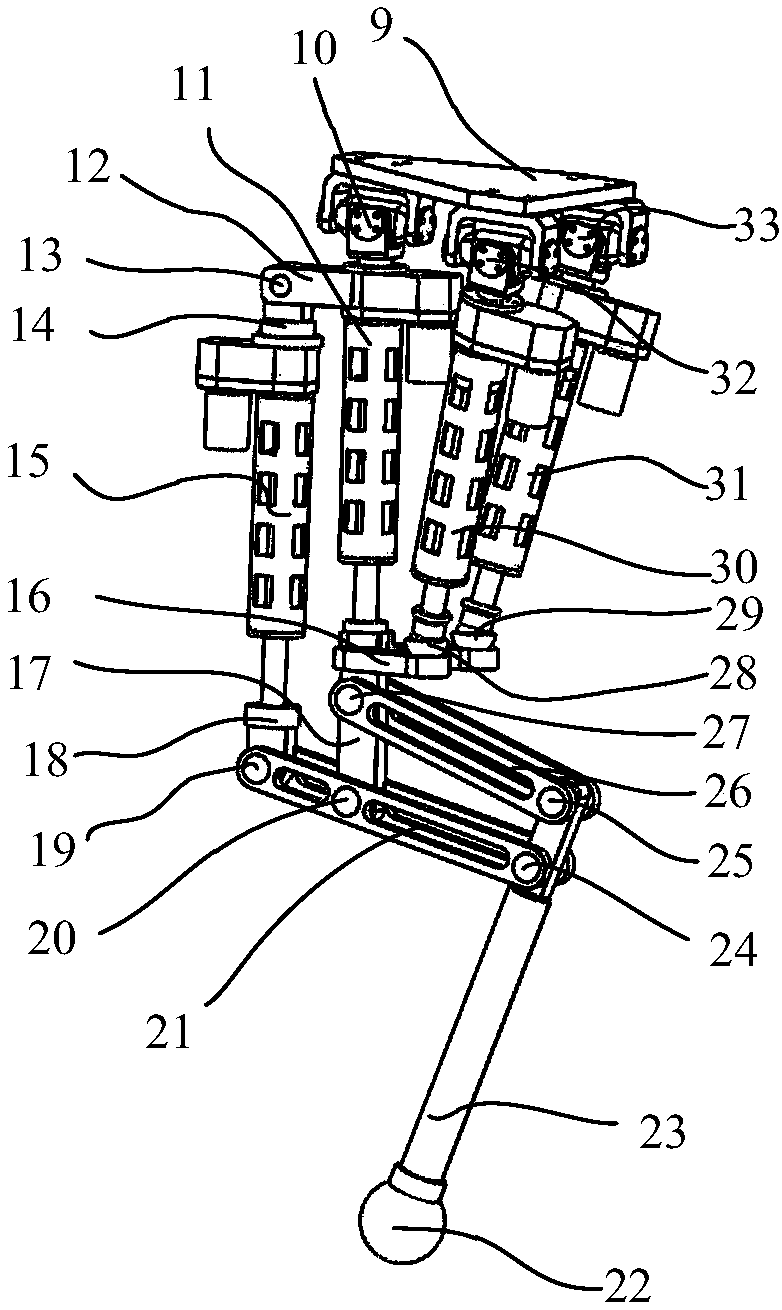
[0015] Such as image 3 As shown, one end of the first linear drive branch 11 in each mechanical leg is connected to a corner of the triangular connecting plate 9 through the first Hooke hinge 10, and the other end of the first linear drive branch is connected to the middle part of the V-shaped piece 16 Fixed connection, the two ends of the V-shaped piece are respectively connected to one end of the third linear drive branch 30...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More