

Laser-tracker-based calibration method for six-degree-of-freedom robot tool coordinate system
A technology of tool coordinate system and laser tracker, which is applied in the field of six-degree-of-freedom industrial robots, can solve the problems of complex operation and low precision, and achieve the effects of simple operation, high precision, data processing and intuitive results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The calibration method of the six-degree-of-freedom robot tool coordinate system based on the laser tracker of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments:
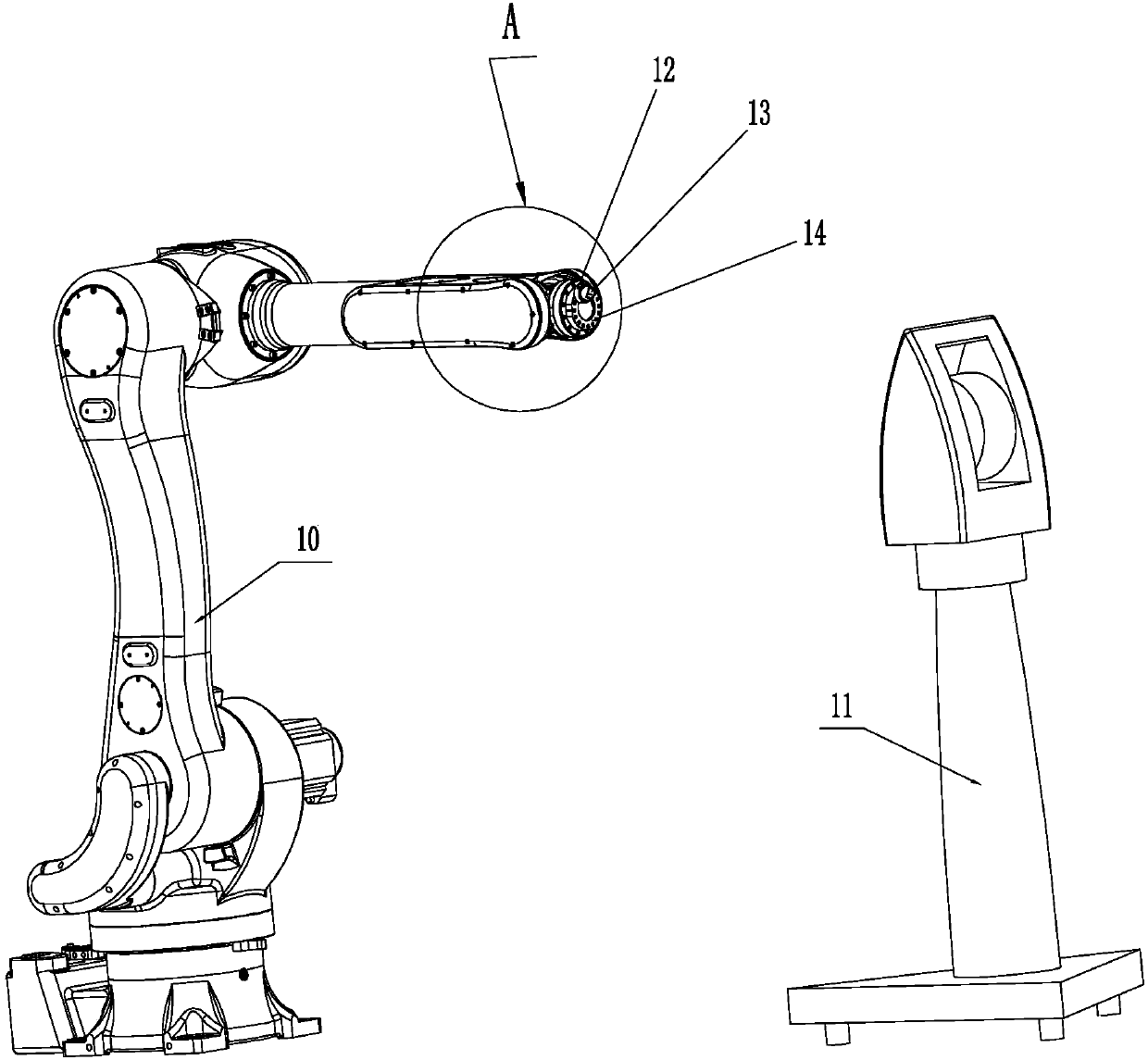
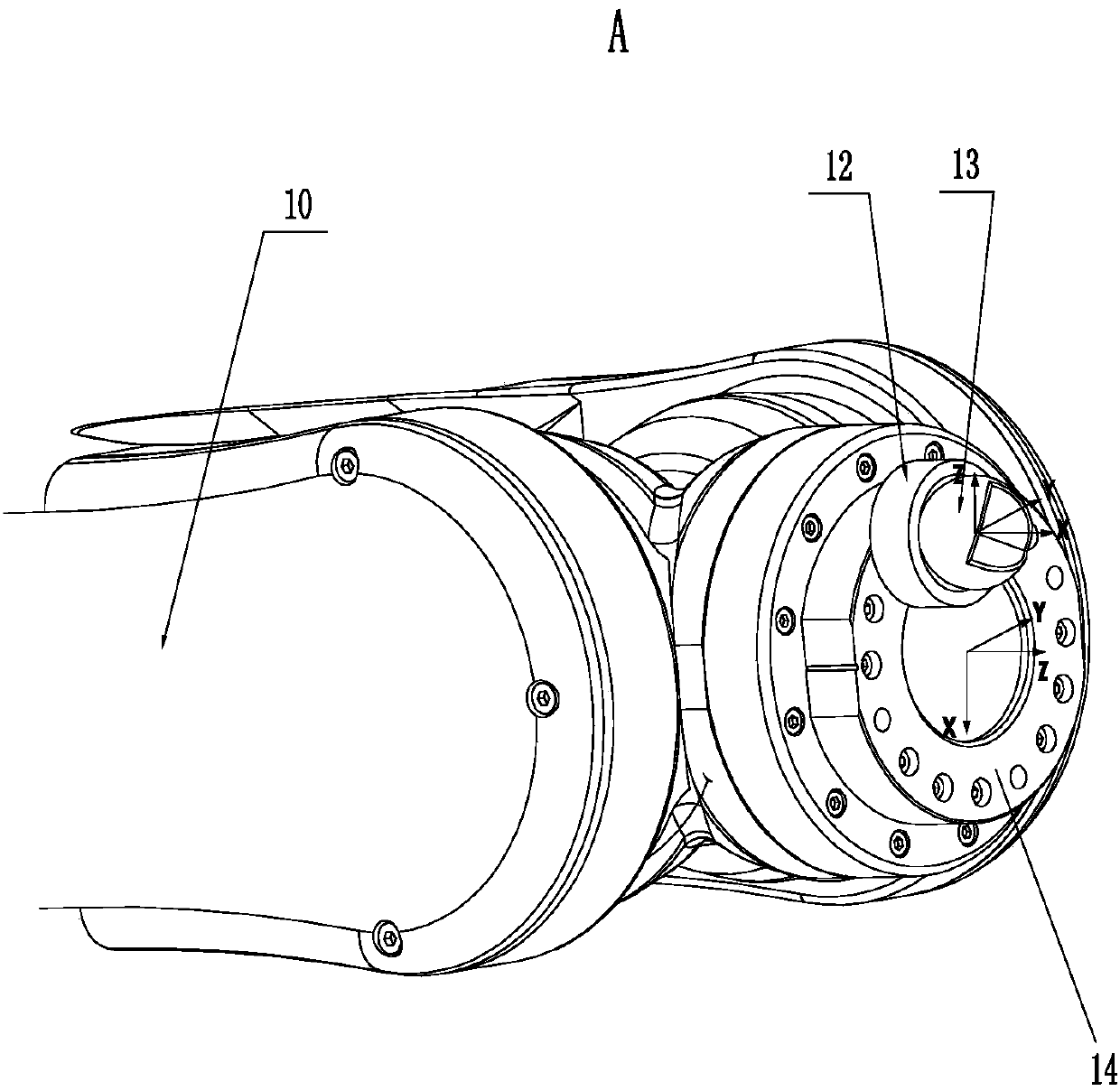
[0034] Such as figure 1 with figure 2 As shown, in this specific embodiment, the calibration method of the six-degree-of-freedom robot tool coordinate system based on the laser tracker of the present invention includes the following steps:
[0035] (1) Place the laser tracker 11 at 3 meters directly in front of the robot body 10, and preheat it in advance;
[0036] (2) fixedly install the target ball base 12 and the target ball 13 on the flange 14 at the end of the robot body 10;
[0037] (3) run SA (Spatial Analyzer) software and connect laser tracker 11;
[0038] (4) adjust the robot body 10 to the non-singular point position near the zero position, and record the spatial position of the target ball 13 under this postur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More