

A Neck Joint Driving Mechanism of Humanoid Robot
A humanoid robot and drive mechanism technology, applied in the field of intelligent robots, can solve the problems of low integration of humanoid robots and head movement performance that cannot meet the actual use requirements, and achieve compact structure, convenient disassembly and assembly, and high power density. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The invention provides a neck joint driving mechanism of a humanoid robot, which is compact in structure, highly integrated, easy to assemble and disassemble, and has performance advantages such as high power density, high rigidity, high precision and high load.
[0026] A detailed description will be given below in conjunction with the accompanying drawings.
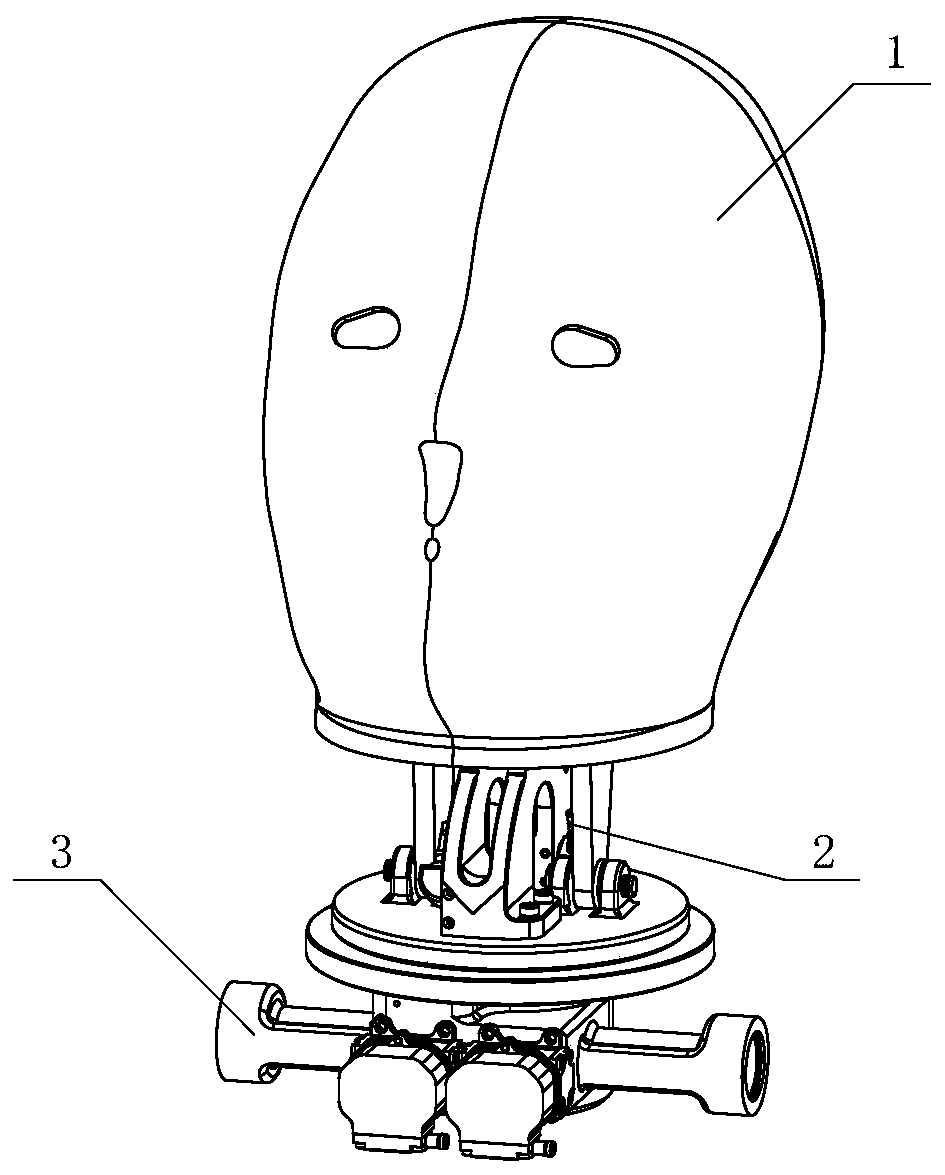
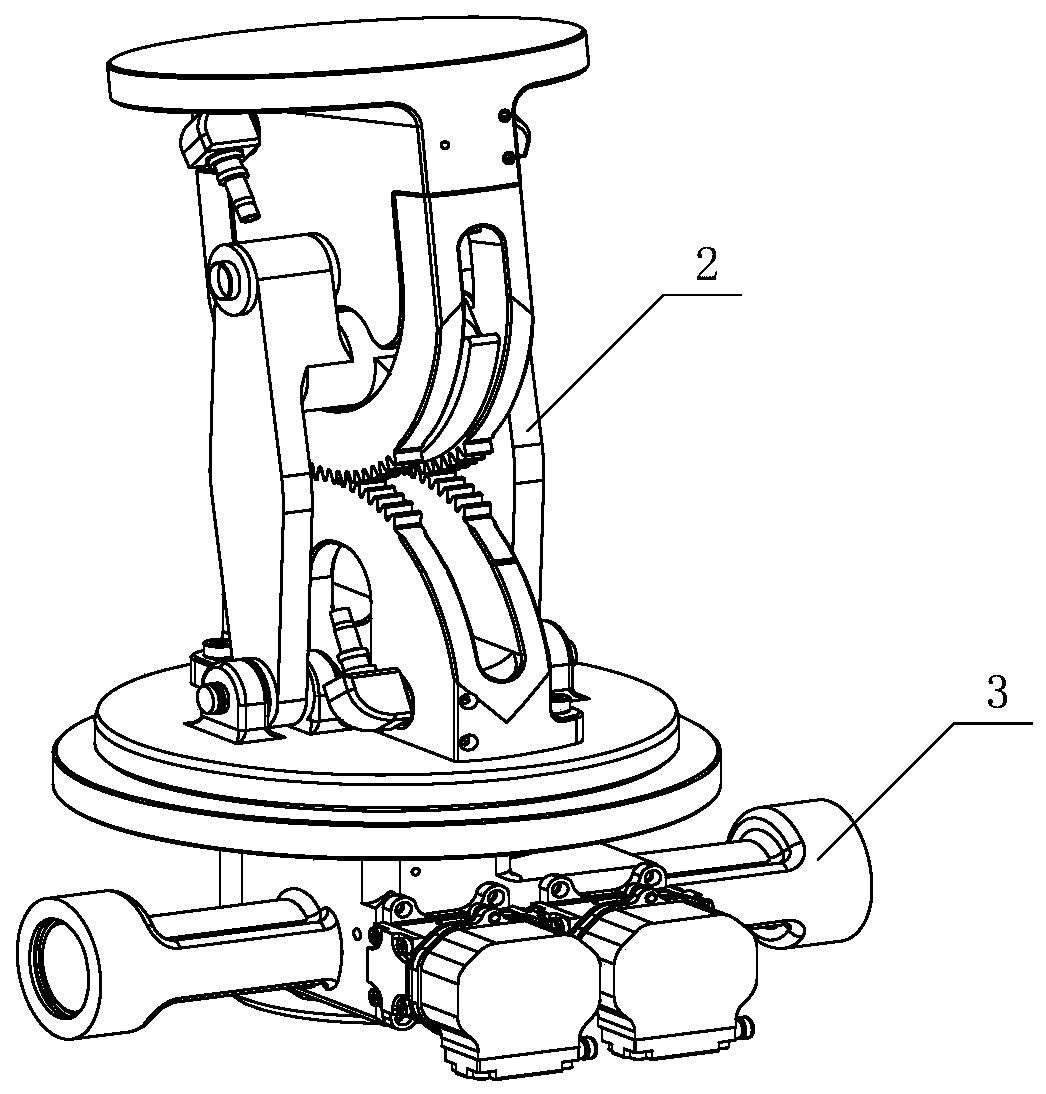
[0027] figure 1 The schematic diagram of the head and neck structure of the humanoid robot provided by the present invention includes a head shell 1, a neck pitching mechanism 2 and a neck turning mechanism 3 located in the neck area; figure 2 It is a structural schematic diagram of the neck joint driving mechanism of the humanoid robot provided by the embodiment of the present invention. Obviously, figure 2 The head shell 1 is not installed on the neck joint driving mechanism in the above. The neck joint drive mechanism of the humanoid robot is provided with a hydraulic pitch drive device and a hydraulic rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More