Component multiple size measuring method and system based on binocular vision
A binocular vision and multi-size technology, applied in the field of visual measurement, can solve problems such as difficulty in feature point matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
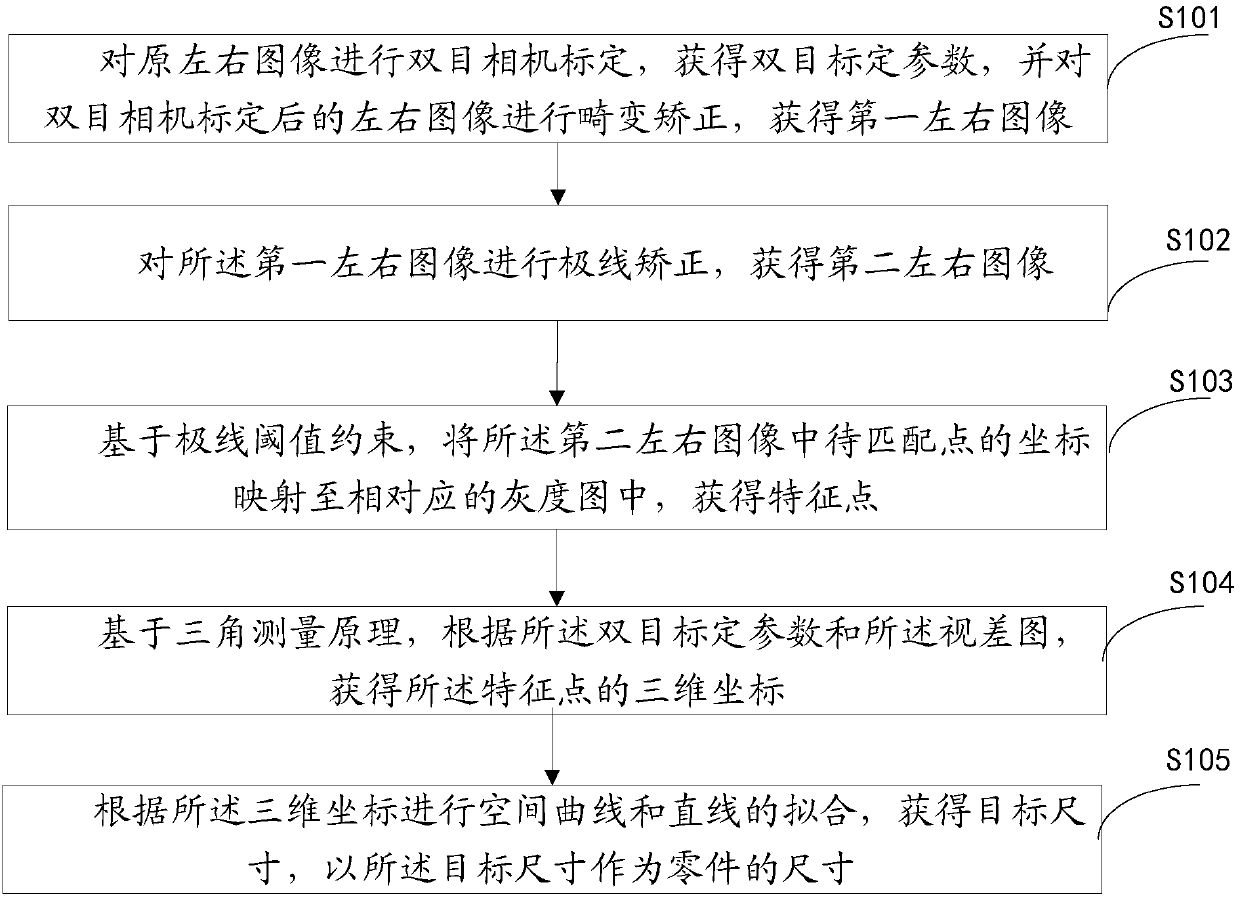
[0068] This embodiment provides a method for measuring multiple dimensions of parts based on binocular vision, please refer to figure 1 , the method includes:
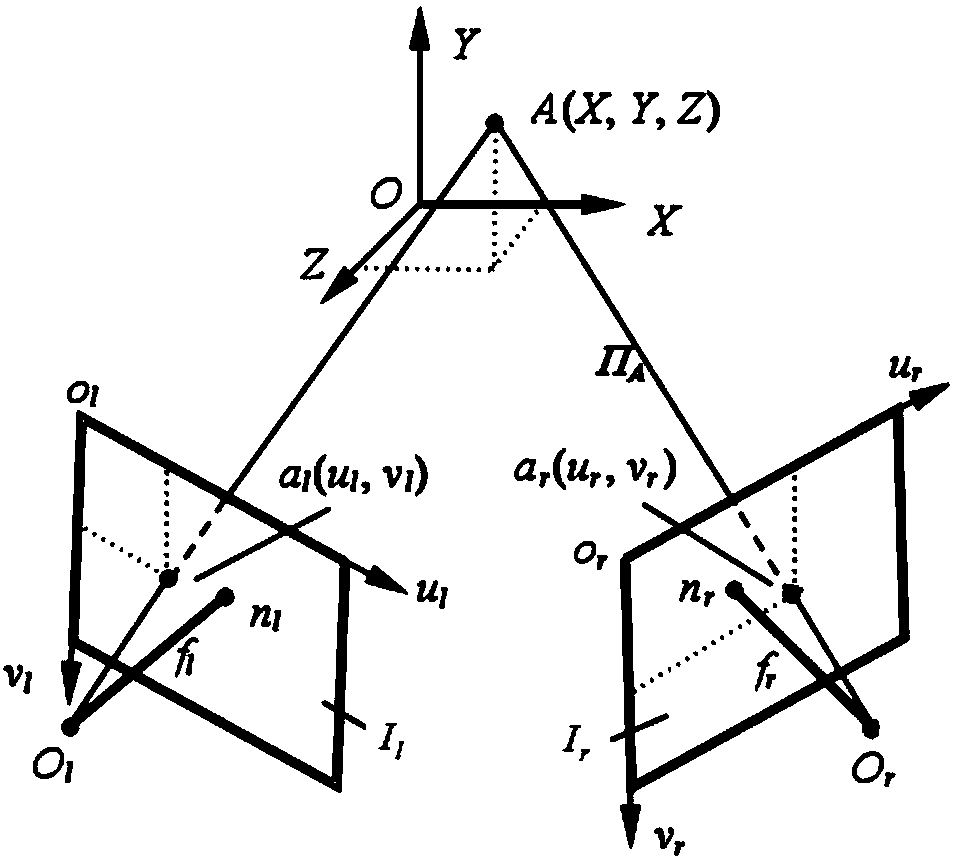
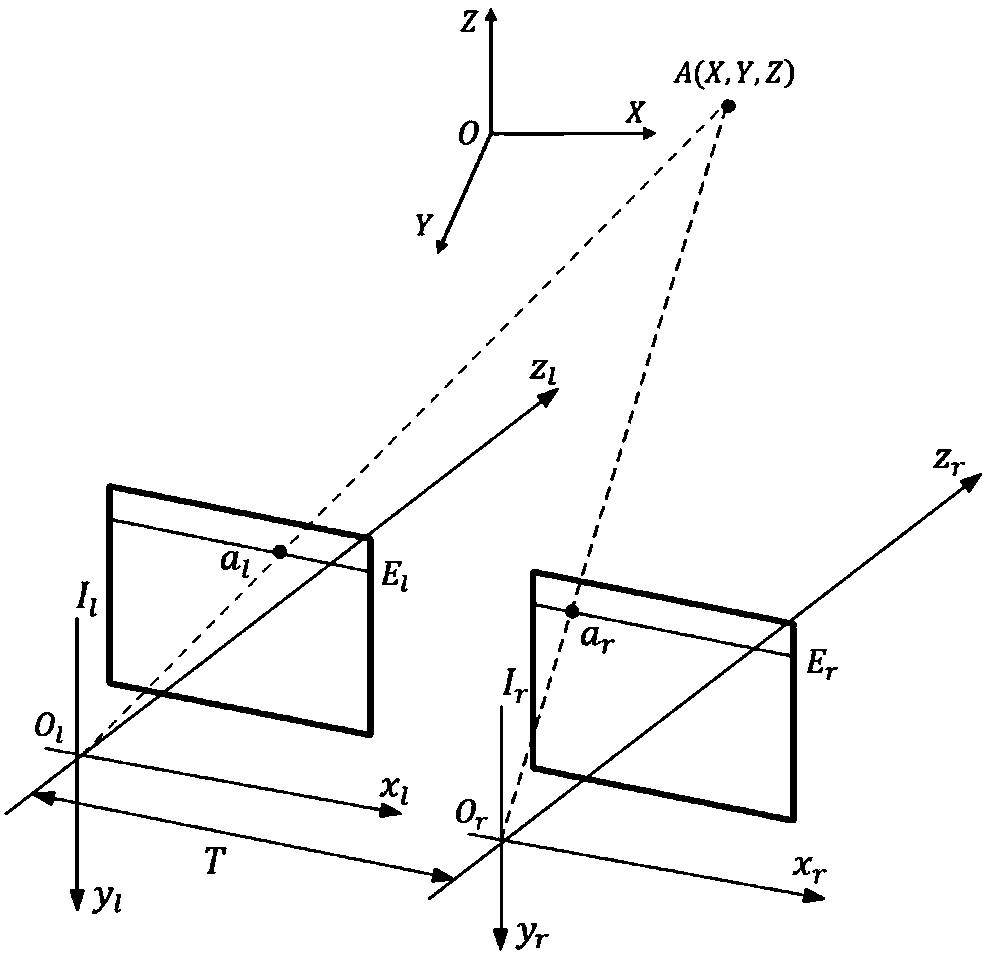
[0069] Step S101: Carry out binocular camera calibration on the original left and right images to obtain binocular calibration parameters, the binocular calibration parameters include the focal length, principal point coordinates, horizontal displacement and distortion coefficient of the left and right cameras, and the left and right images after binocular camera calibration Perform distortion correction on the image to obtain the first left and right images;
[0070] Step S102: Perform epipolar correction on the first left and right images to obtain second left and right images;
[0071] Step S103: Based on the epipolar threshold constraint, map the coordinates of the points to be matched in the second left and right images to the corresponding grayscale images to obtain feature points, wherein the feature points inc...
Embodiment 2
[0110] Based on the same inventive concept as that of Embodiment 1, Embodiment 2 of the present invention provides a multi-dimensional measurement system for parts based on binocular vision. Please refer to Figure 4 , the system includes:
[0111] The distortion correction module 201 is used to perform binocular camera calibration on the original left and right images, and obtain binocular calibration parameters. The binocular calibration parameters include the focal length, principal point coordinates, horizontal displacement, and distortion coefficient of the left and right cameras. Distortion correction is performed on the calibrated left and right images to obtain the first left and right images;
[0112] An epipolar line correction module 202, configured to perform epipolar line correction on the first left and right images to obtain second left and right images;
[0113] The feature matching module 203 is configured to map the coordinates of the points to be matched in...
Embodiment 3
[0129] Based on the same inventive concept as that of Embodiment 1, Embodiment 3 of the present invention provides a computer-readable storage medium 500. Please refer to Figure 5 , a computer program 511 is stored thereon, and when the program is executed by the processor, the following steps are implemented:
[0130] Carry out binocular camera calibration on the original left and right images to obtain binocular calibration parameters, which include the focal length, principal point coordinates, horizontal displacement and distortion coefficient of the left and right cameras, and distort the left and right images after binocular camera calibration Correction, to obtain the first left and right images;
[0131] performing epipolar correction on the first left and right images to obtain second left and right images;
[0132] Based on the epipolar threshold constraint, the coordinates of the points to be matched in the second left and right images are mapped to corresponding ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More