Method and control system for eliminating deviation of limb movement trajectory
A motion trajectory and control system technology, used in passive exercise equipment, physical therapy, etc., can solve the problems of insufficient accuracy of angle sensors, accumulation of trajectory deviation, danger, etc., to improve fluency and accuracy, eliminate trajectory deviation, Avoid multiple cumulative effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to fully understand the technical content of the present invention, the technical solutions of the present invention will be further introduced and illustrated below in conjunction with specific examples, but not limited thereto.
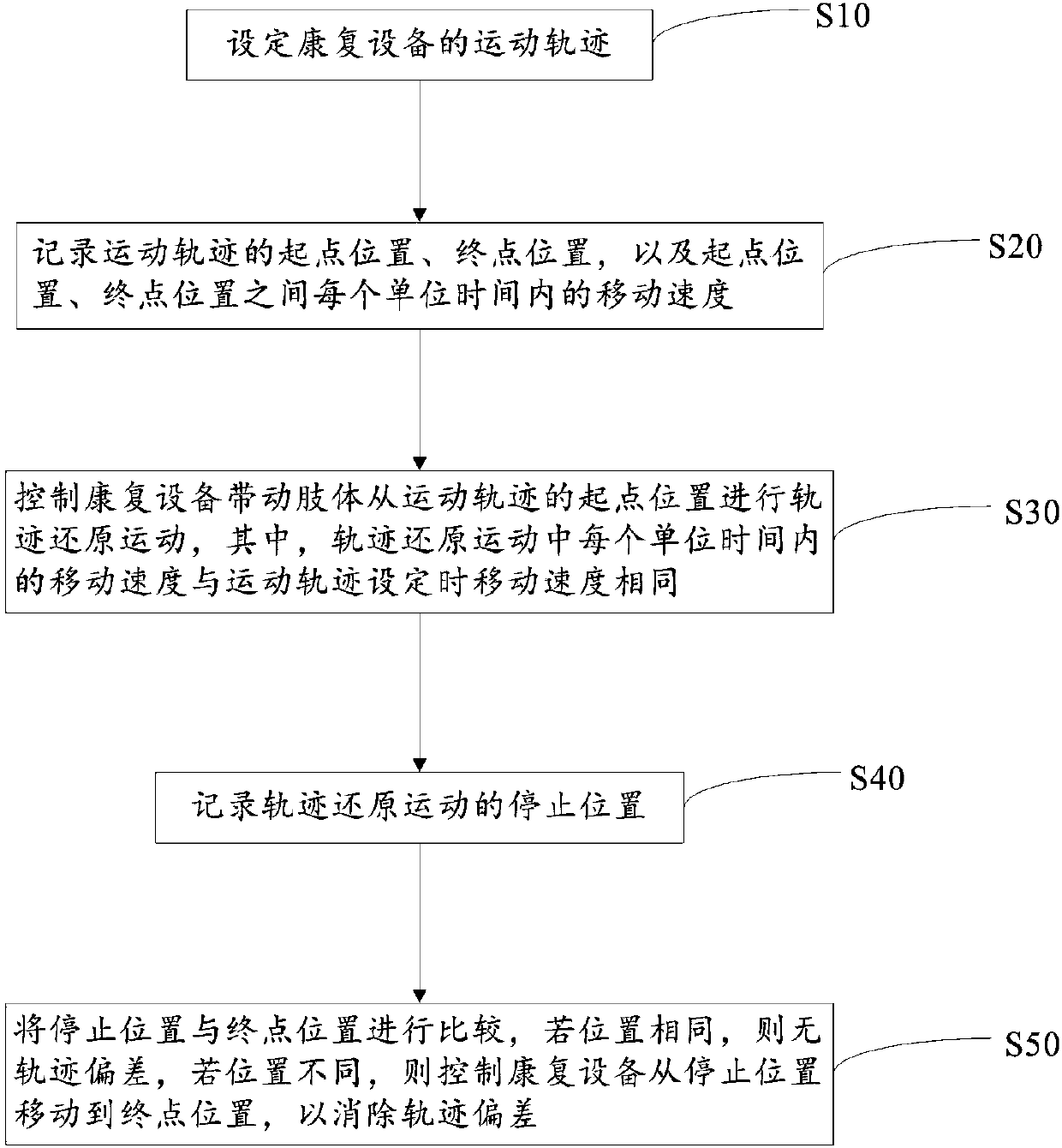
[0042] see figure 1 The specific embodiment shown, the present invention provides a kind of method that eliminates limb movement locus deviation, and method comprises the following steps:
[0043] S10, setting the movement trajectory of the rehabilitation equipment;
[0044] S20. Record the starting position and end position of the motion track, and the moving speed per unit time between the starting position and the end position;
[0045] S30. Control the rehabilitation equipment to drive the limbs to perform trajectory restoration movement from the starting point of the movement trajectory, wherein the movement speed per unit time in the trajectory restoration movement is the same as the movement speed when the movement trajectory...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More