

Humanoid robot gait planning method based on human body teaching
A humanoid robot, gait planning technology, applied in the field of artificial intelligence and robot control, can solve problems such as robot gait stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
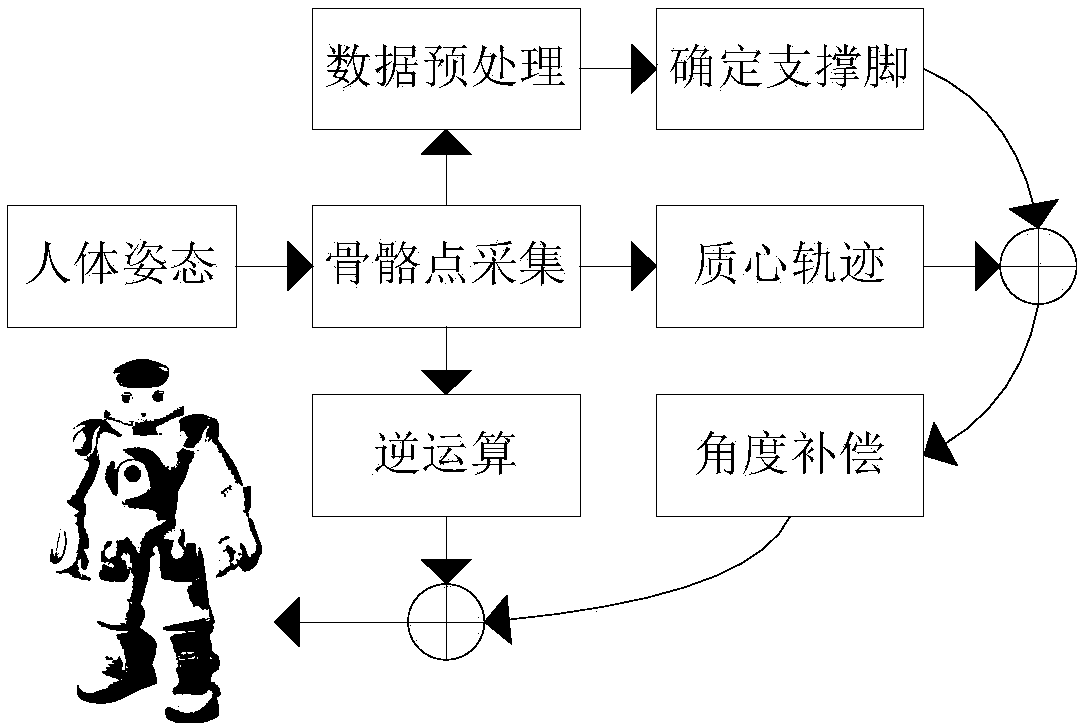
[0074] The human body teaching data is collected through the somatosensory camera Kinect, and the robot gait is planned through the teaching data to realize the robot's imitation of human body movements. The specific implementation methods are as follows:
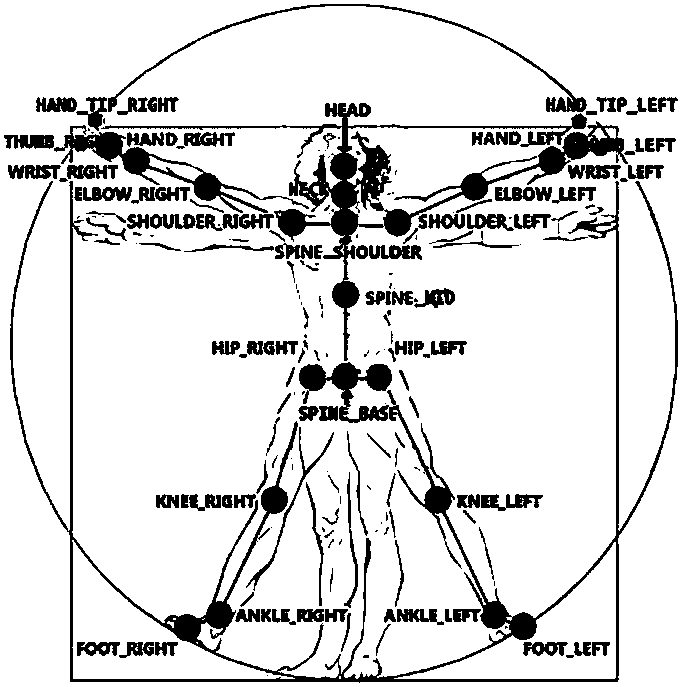
[0075] Step 1. Use the somatosensory camera kinect to collect the bone point data of the human body teaching process, and calculate the teaching angle for the joints of the lower limbs, a total of 10 degrees of freedom for the left and right hips, left and right knees, and left and right ankles.
[0076] Step 2. Use the somatosensory camera kinect to collect the bone point data of the human body teaching process to estimate the trajectory information of the robot's center of mass. Calculate the vector of the human body limbs in the kinect coordinate system. After being proportionally reduced by 0.32 times, combine the robot mass distribution to estimate the robot Center of mass trajectory information.
[0077] Step 3. Use t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More