

Wall climbing operation robot suitable for moving on variable-curvature wall surface
A technology of operating robots and variable curvature, which is applied in the direction of motor vehicles, tracked vehicles, transportation and packaging, etc., can solve the problems of inability to flexibly adapt to surface changes, robot movement failure, lack of flexibility, etc., to avoid underpinning or movement failure, The overall structure is simple and compact, and the effect of convenient and quick disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further explained below in conjunction with the embodiments and accompanying drawings, but this should not be used as a limitation to the protection scope of the claims of the present application.
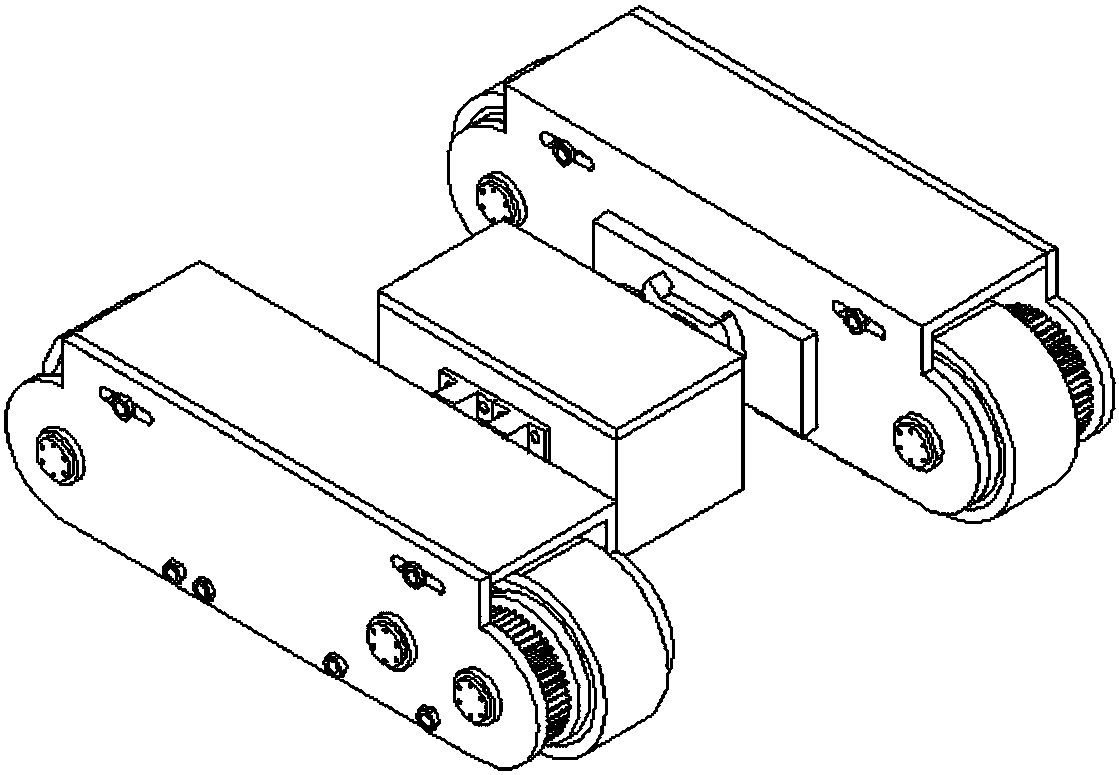
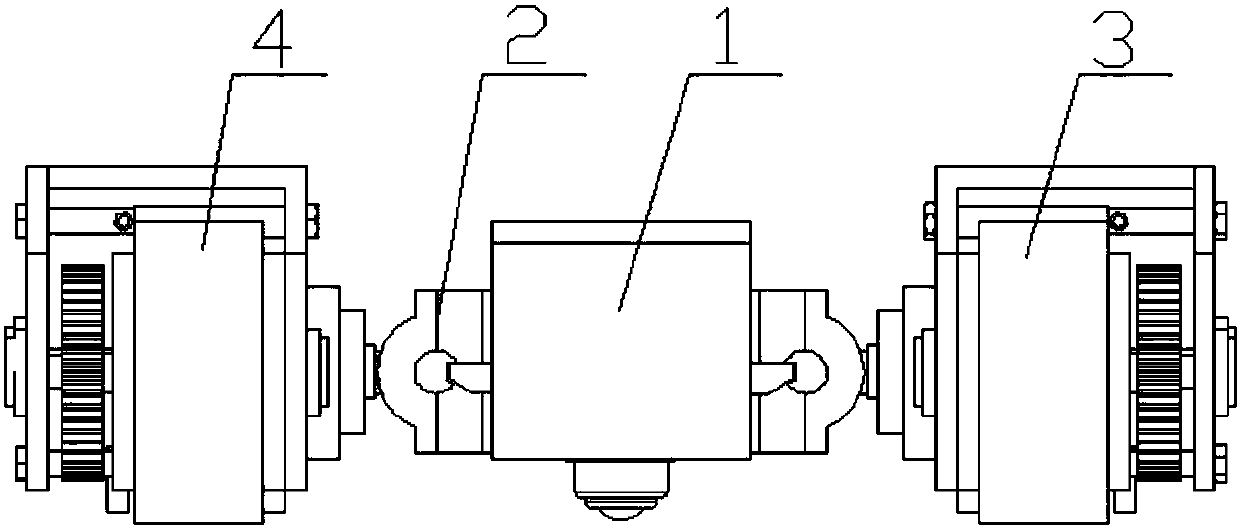
[0032] The present invention is applicable to the wall-climbing operation robot (abbreviation robot, see Figure 1-10 ) includes two mutually independent mobile modules and a vehicle body intermediate platform 1, the two mutually independent mobile modules are identical in structure, arranged symmetrically with the vehicle body intermediate platform 1 as the center, and pass through the two-degree-of-freedom The limit connection joint 2 is connected with the middle platform 1 of the vehicle body, and the two mutually independent mobile modules include a right mobile module 3 and a left mobile module 4, and each mobile module includes a driving structure fixed on the vehicle frame, a transmission structure, Walking structure, tension structure an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More