

Foot/wheel/track mixing four-wheel drive vehicle with dry adhesion and claws and moving method thereof
A technology of dry adhesion and four-wheel drive, which is applied in the field of robotics, can solve the problems of limited robot functions and no research has been carried out, and achieve the effect of clear movement principle, small size and convenient movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
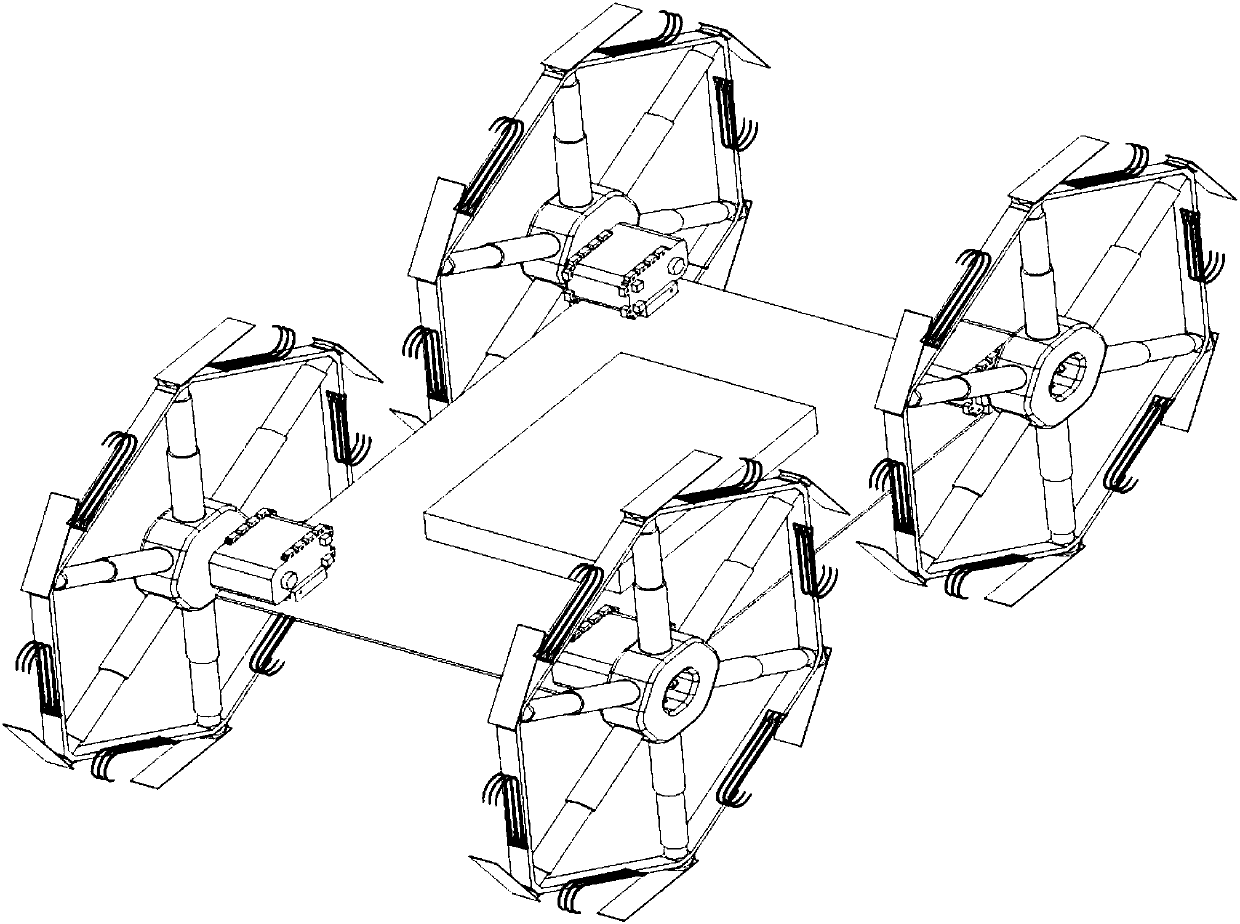
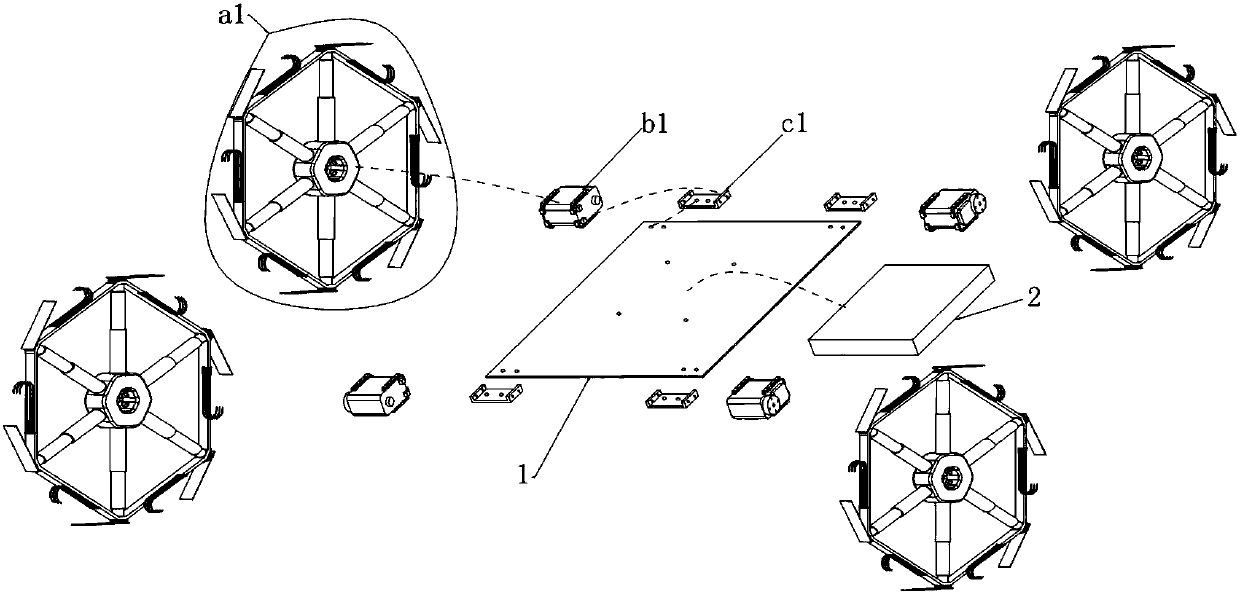
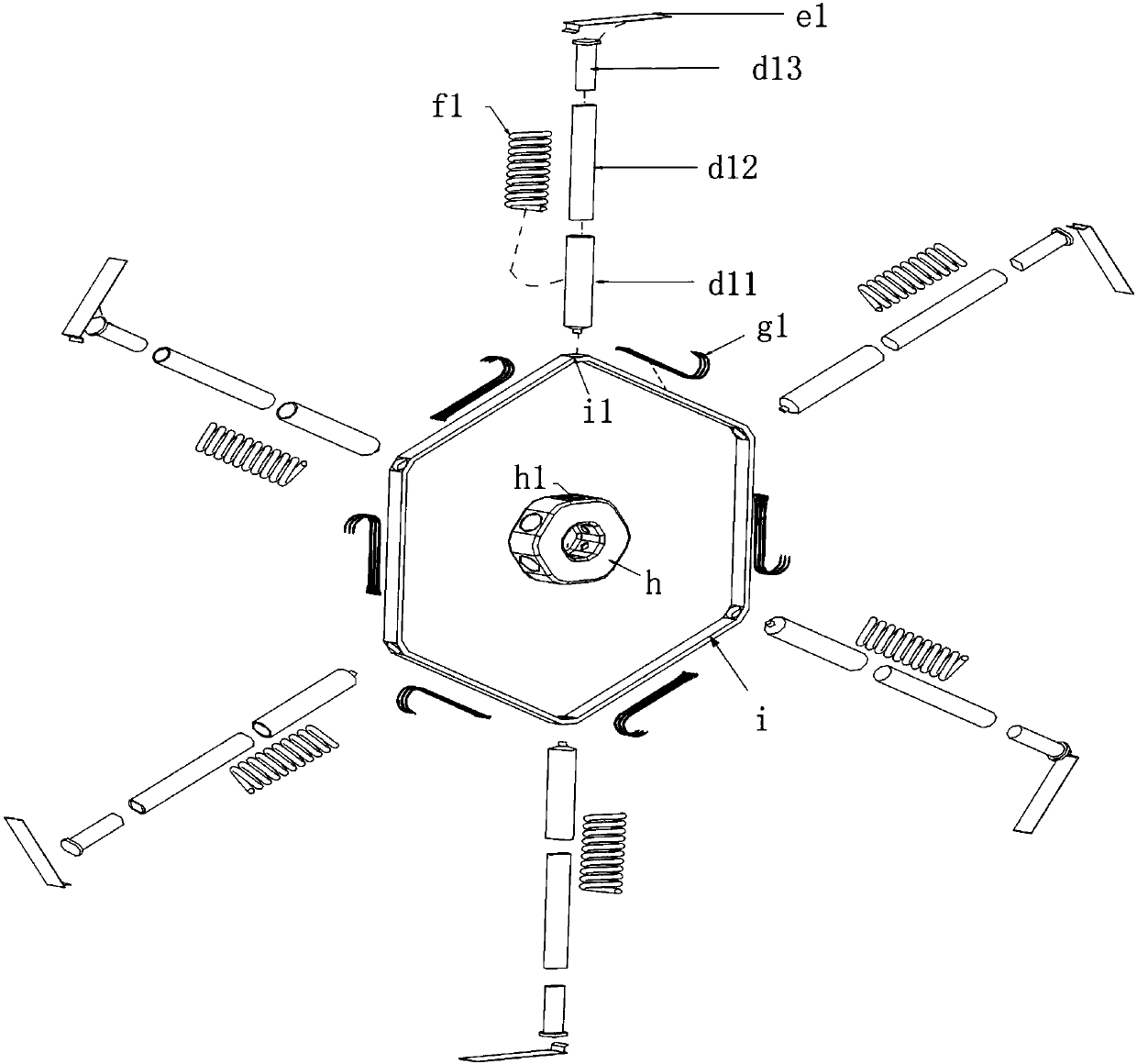
[0021] combine figure 1 , figure 2 with image 3 , this embodiment is a foot / wheel / track hybrid four-wheel drive vehicle with dry adhesion and claws and its movement method, including a body 1, a body control box 2, a steering gear b1, a steering gear fixing groove c1, and a wheel foot a1 , Damping shock absorbing telescopic sleeve d11, damping shock absorbing telescopic rod d12, fixed cap d13, dry adhesive material sheet e1, shock absorbing spring f1, fixed hook g1, positive n-gon support ring h, support hole h1, positive n Edge elastic track i, positioning hole i1.
[0022] Which combines figure 1 , figure 2 , this embodiment is a foot / wheel / track hybrid four-wheel drive vehicle with dry adhesion and claws and its movement method, including a body 1, a control box 2, and four wheel-foot power mechanisms distributed symmetrically along t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More