

Multi-ocular stereoscopic vision three-dimensional scanning method and system
A technology for multi-eye stereo vision and three-dimensional scanning, applied in the field of three-dimensional scanning methods and systems for multi-eye stereo vision, can solve problems such as missing point cloud data, small geometric feature sizes, and inability to measure parts, so as to improve scanning efficiency and scanning accuracy, data processing algorithm optimization, and the effect of solving blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
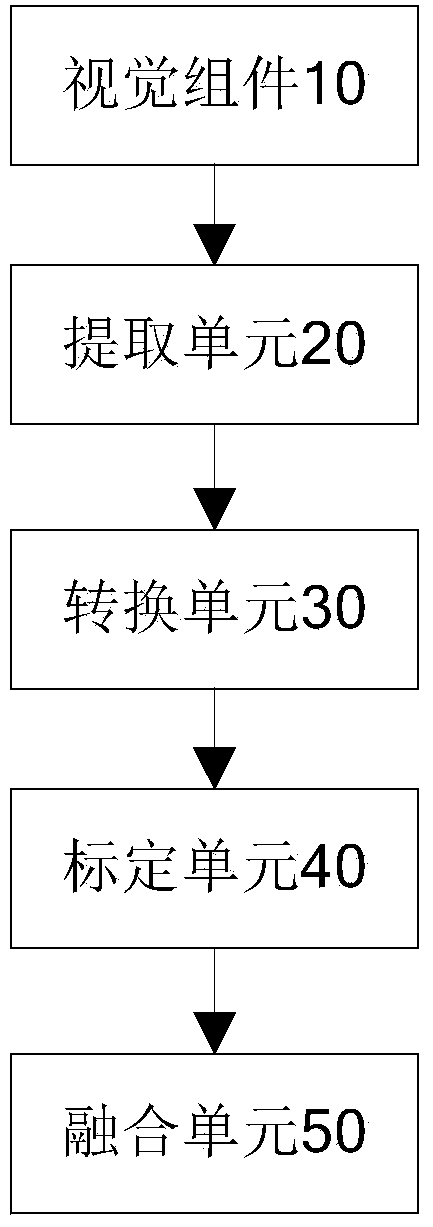
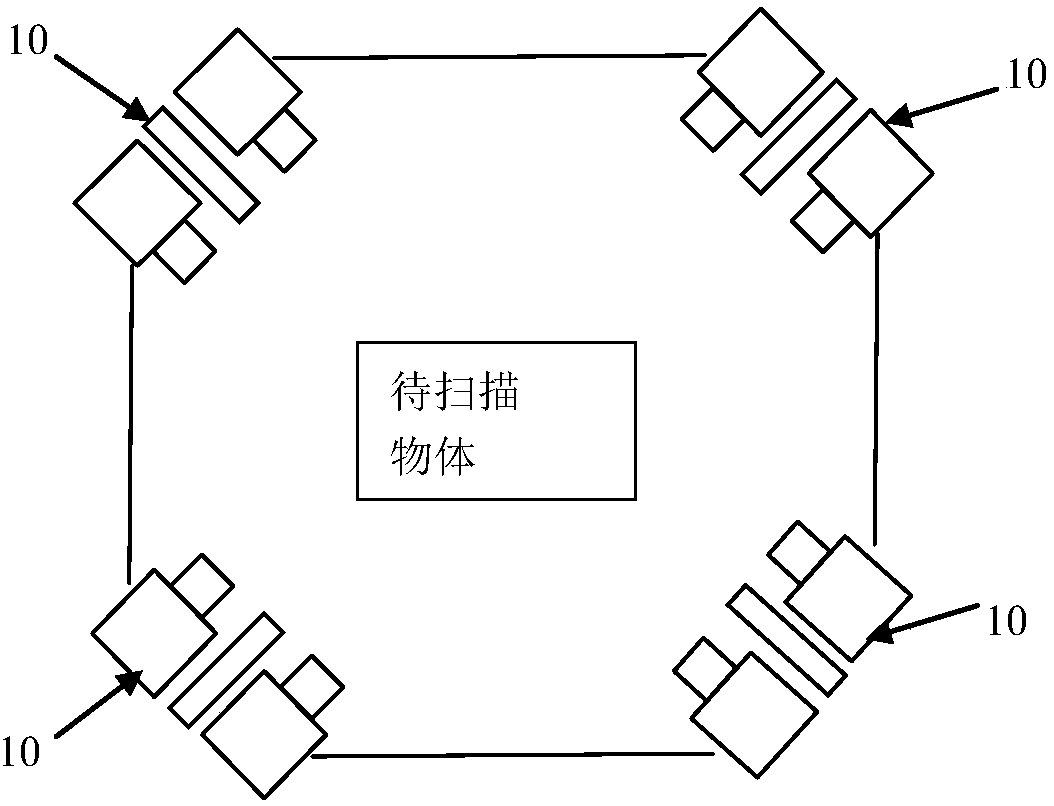
[0057] figure 1 A three-dimensional scanning system with multi-eye stereo vision in some embodiments of the present invention is shown, which is used to perform omni-directional lateral scanning on the surface of an object to be scanned from different viewing angles. The three-dimensional scanning system of multi-eye stereo vision in this embodiment includes a vision component 10, an extraction unit 20, a conversion unit 30, a calibration unit 40, a fusion unit 50, and a lifting platform (not shown), wherein the vision component 10 is used to treat Scan the object to perform three-dimensional scanning and obtain the light band image group, the lifting platform is used to carry the visual component 10 to move up and down...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More