

Three-degree-of-freedom photoelectric pod driven by orthogonal decoupling torque
A technology of photoelectric pods and degrees of freedom, applied in the direction of using feedback control, etc., can solve problems such as changes in optical axis direction, complex coupling of system structure, and shrinking load space, so as to reduce frictional interference, overcome blind spots, and control accuracy Improved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
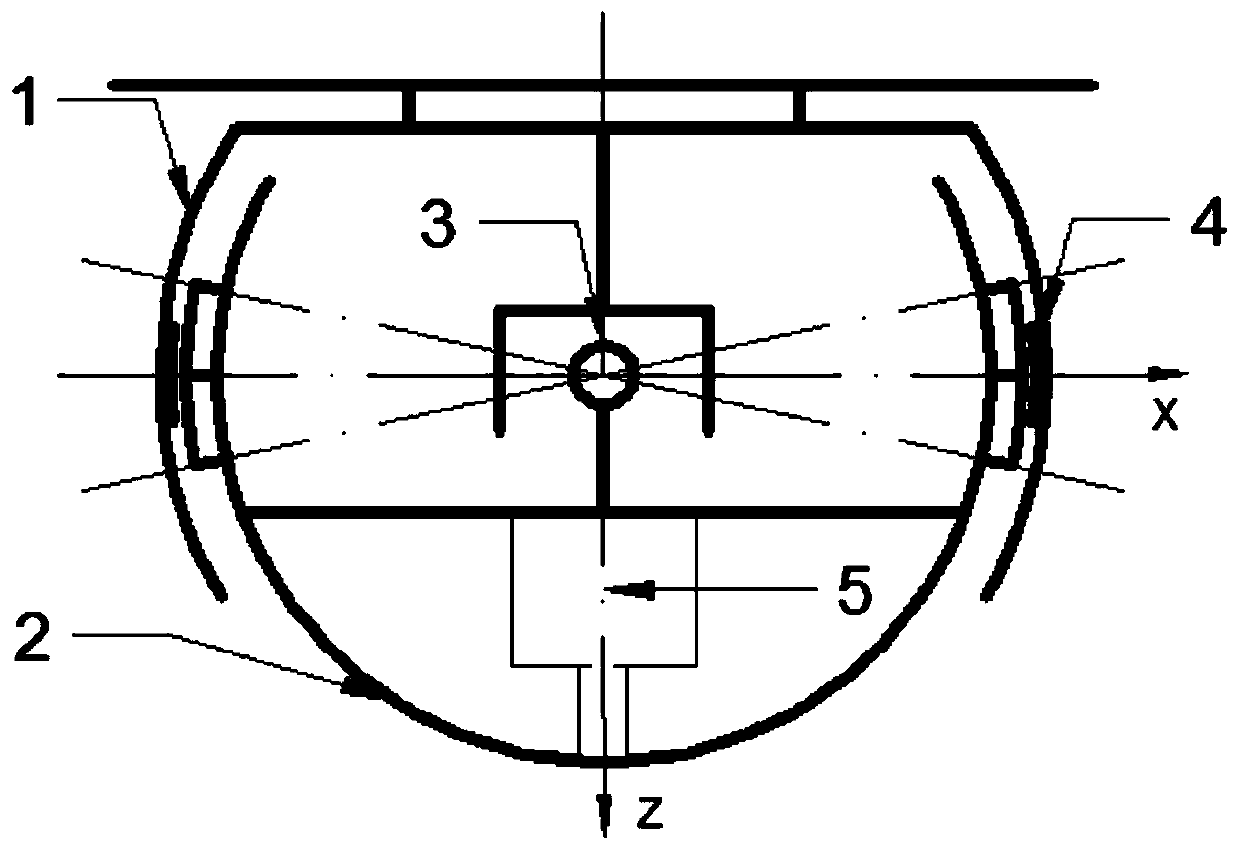
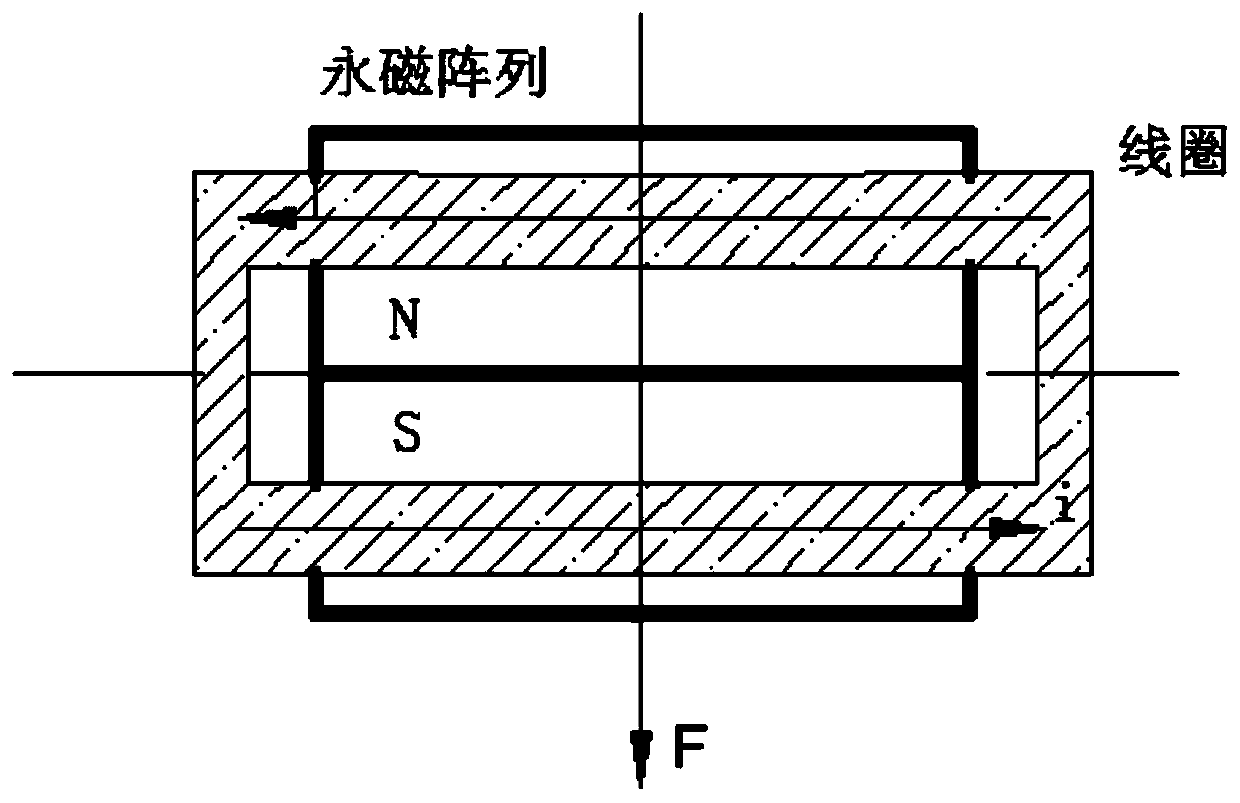
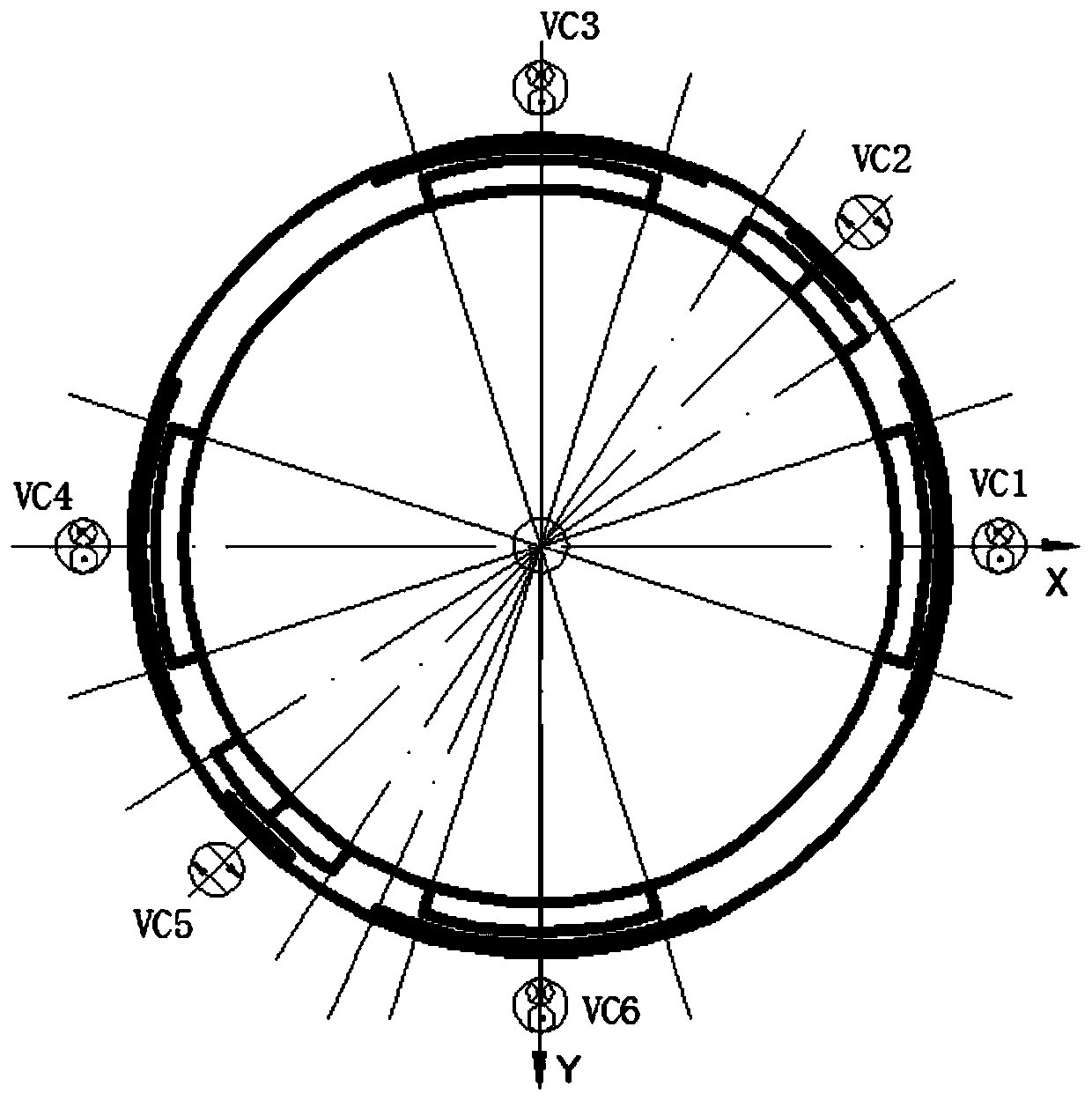
[0024] figure 1 It is a schematic diagram of an embodiment of the present invention, wherein the fixed ring of the ball joint support 3 is connected to the stator 1 on the carrier to retain the three-directional rotation of the ball joint shaft and constrain the three-way displacement of the ball joint shaft; the stator structure has an extension The hemispherical structure is covered on the outside of the hemispherical rotor 2; the hemispherical rotor is firmly connected with the ball joint support, and the rotor connection load 5 is used as a stable platform for the system; the outer wall of the hemispherical rotor 2 is arranged with a spherical shell permanent magnet group, and the stator 1 A spherical shell coil is arranged inside the spherical shell. The spherical centers of the rotor and the stator are both ball joint support centers, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More