

Adaptive Kalman filtering method of vehicle-mounted microinertia/satellite integrated navigation system
An integrated navigation system, adaptive Kalman technology, applied in satellite radio beacon positioning system, navigation through speed/acceleration measurement, navigation calculation tools, etc., can solve the problems of reducing the calculation amount of traditional adaptive filtering, etc., and achieve improvement The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and examples, but the implementation and protection of the present invention are not limited thereto.
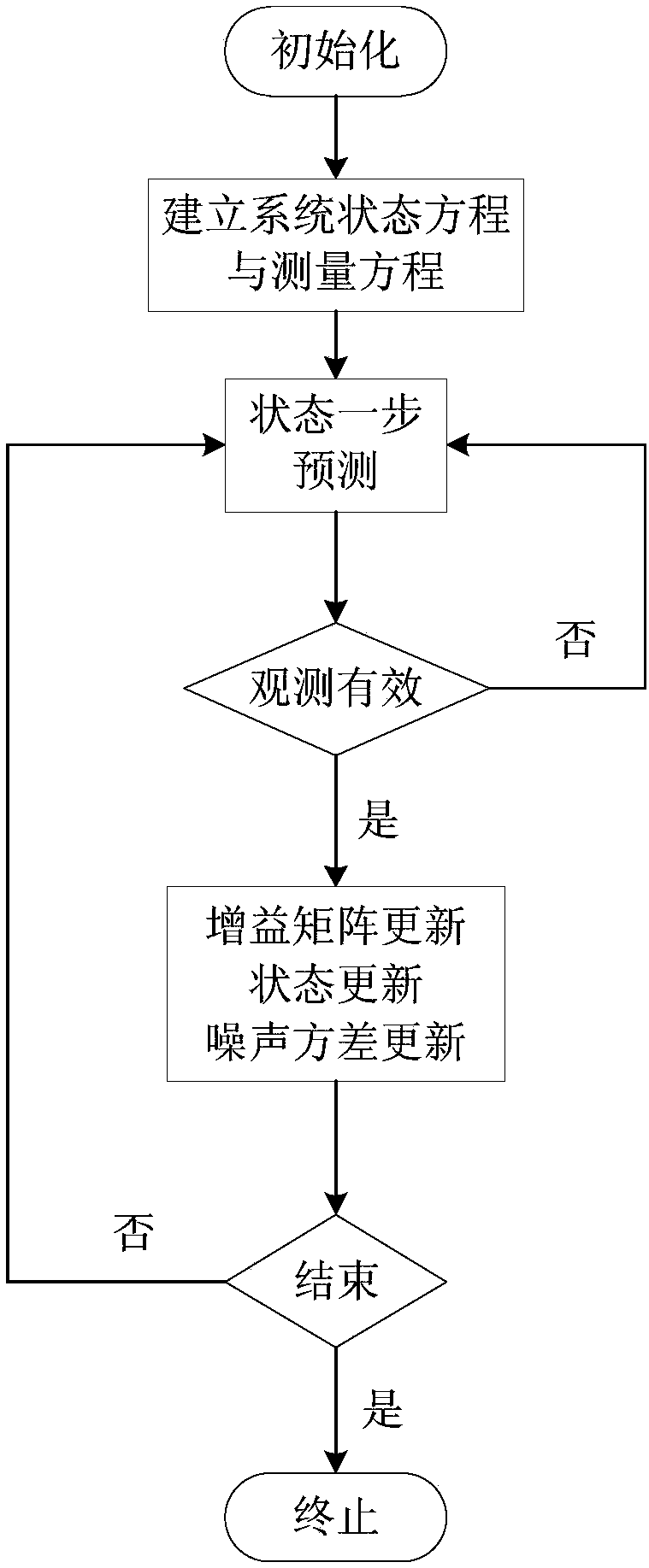
[0084] Such as figure 1 , Step 1: Taking attitude error, velocity error, latitude and longitude error, gyroscope error, and accelerometer error as state variables, using the difference between the position information and velocity information provided by the GPS system and the position and velocity information provided by micro-inertial navigation as the observation Variables, establish the state equation and measurement equation of the integrated navigation system
[0085] x k = Φ k / k-1 x k-1 +w k-1
[0086] z k =H k x k +v k
[0087] x k is the state matrix, z k is the measurement matrix, Φ k / k-1 is the state transition matrix, H k is the measurement matrix, w k-1 is the system Gaussian white noise, and the system noise va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More