

Kinematics parameter error calibration method of rope-driven parallel robot
A technology of kinematic parameters and rope drive, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as slow calibration speed, error, and reduced error accuracy of robot kinematic parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
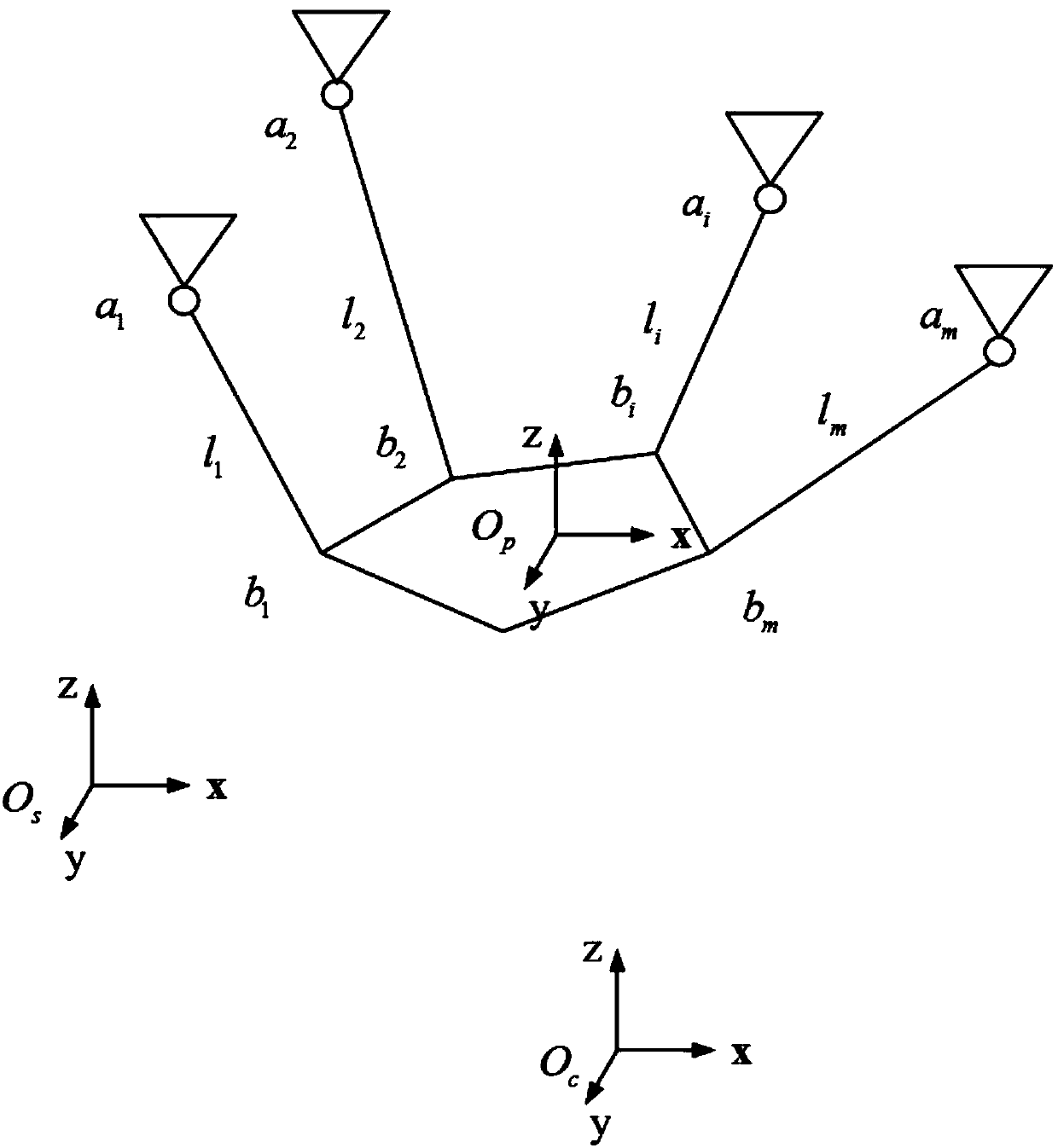
[0053] In this embodiment, a cable-driven parallel robot kinematic parameter error calibration method based on position and attitude measurement is applied to the calibration process of the cable-driven parallel robot, and a position and attitude measurement device is installed on the side of the cable-driven parallel robot; specifically In other words, the error calibration method includes: a parallel robot kinematics parameter error identification model, a position and attitude measurement device coordinate system calibration module, and a robot kinematics parameter error identification module.
[0054] There are kinematic parameter errors in the cable-driven parallel robot, and the kinematic parameter error model of the parallel robot is established according to the kinematic model of the parallel robot; the parameter error identification model is obtained according to the kinematic error parameter model and the error measured by the position and attitude measurement device, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More