

Control method for robot
A control method and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of unimaginable computational complexity and large amount of calculation, and achieve the effect of reducing the amount of calculation and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below with reference to the accompanying drawings. It should be pointed out that these descriptions are exemplary rather than limiting the present invention.
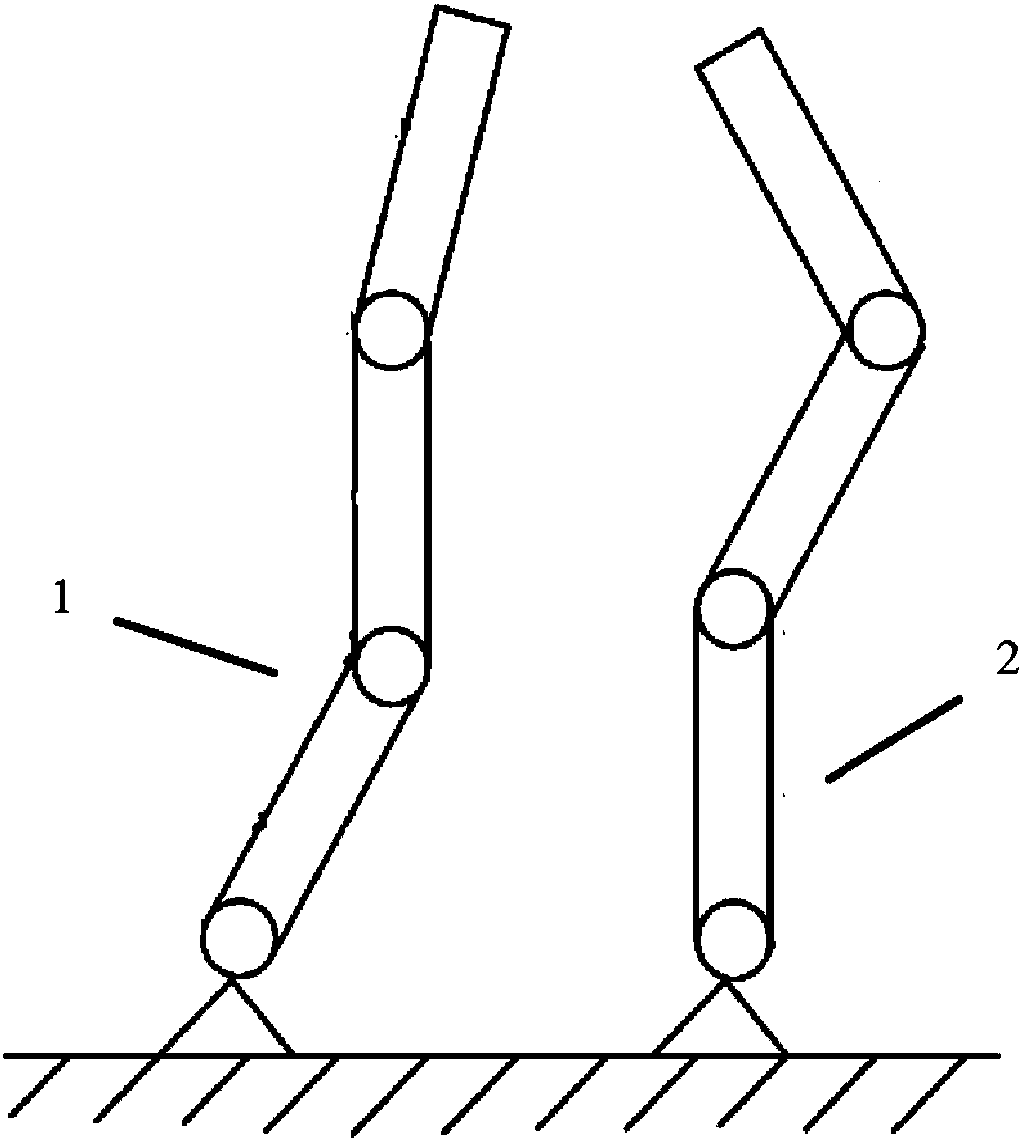
[0017] figure 1 A robot in one embodiment according to the invention is shown; it moves in a horizontal plane with no gravity constraints. As shown, the robot has two arms, a left arm 1 and a right arm 2 . Each arm has its own base, three joints, and three links. Three of the joints and three links are connected alternately, the first joint connects the base to the first link, and the third link connects the end effector. The end effector can be various manipulators.
[0018] Taking the right arm as an example, for the i-th connecting rod (i=1,2,3), its mass is mi kg, its length is li m, its center of mass is at di m from joint i, and its center of mass is The moment of inertia is Ioi kg·m2. At the same time, for the i-th joint, its moment of inertia is Imi kg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More