

Leg robot single-leg device with rigid and flexible switchable joint
A robot and joint technology, which is applied in the field of footed robot single-leg devices, can solve the problems of complex design of the lower leg and joints, and reduce the dynamic performance of the footed robot's single leg, so as to improve space utilization, light weight, and increase strength. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the accompanying drawings.
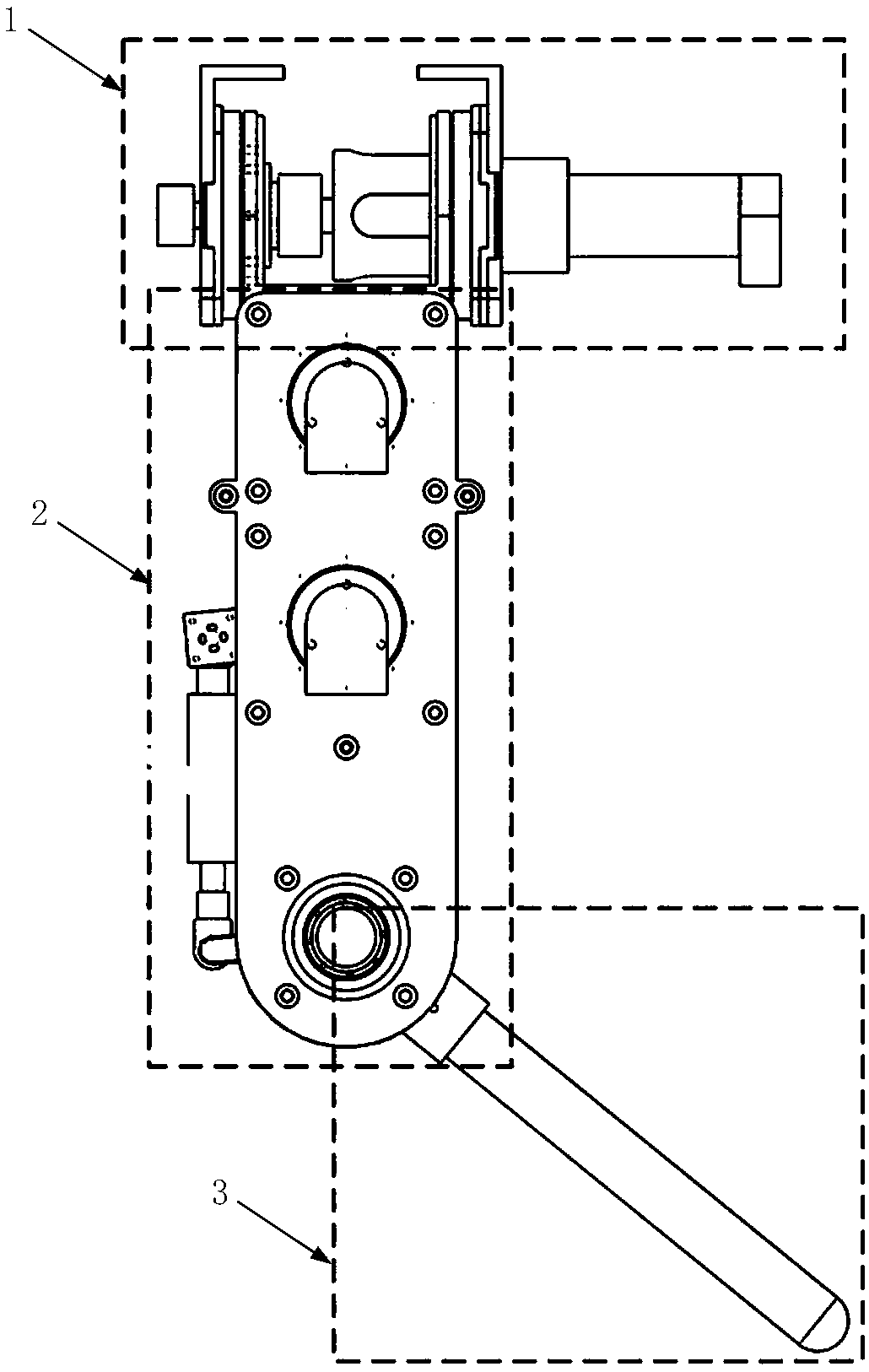
[0033] The footed robot single-leg device with rigid-flexible interchangeable joints of the present invention includes a hip part 1, a thigh part 2 and a lower leg part 3, such as figure 1 shown
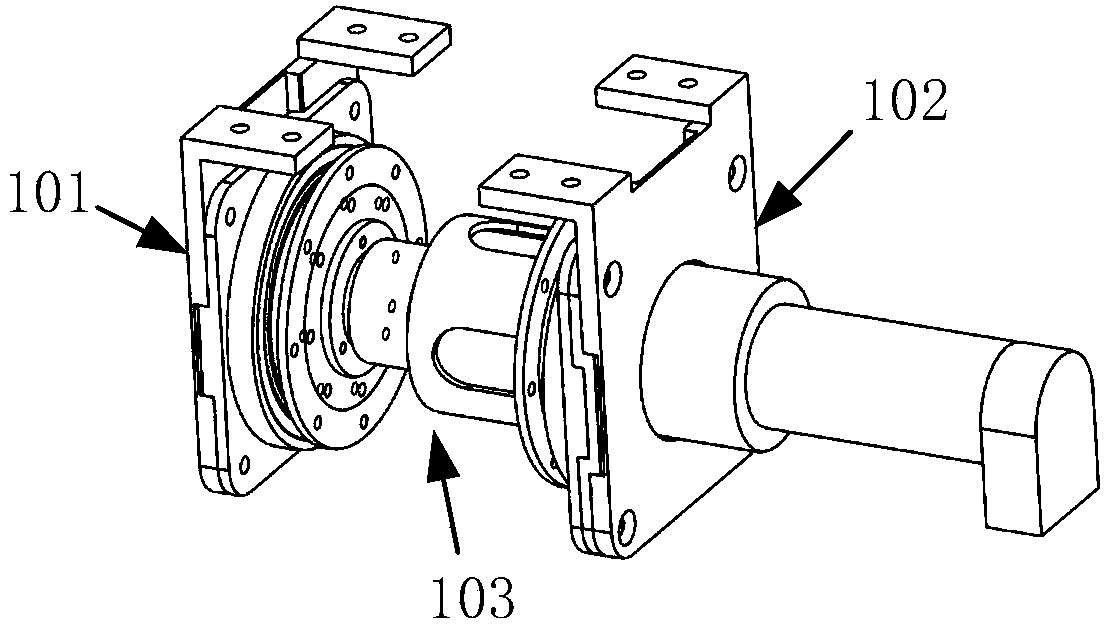
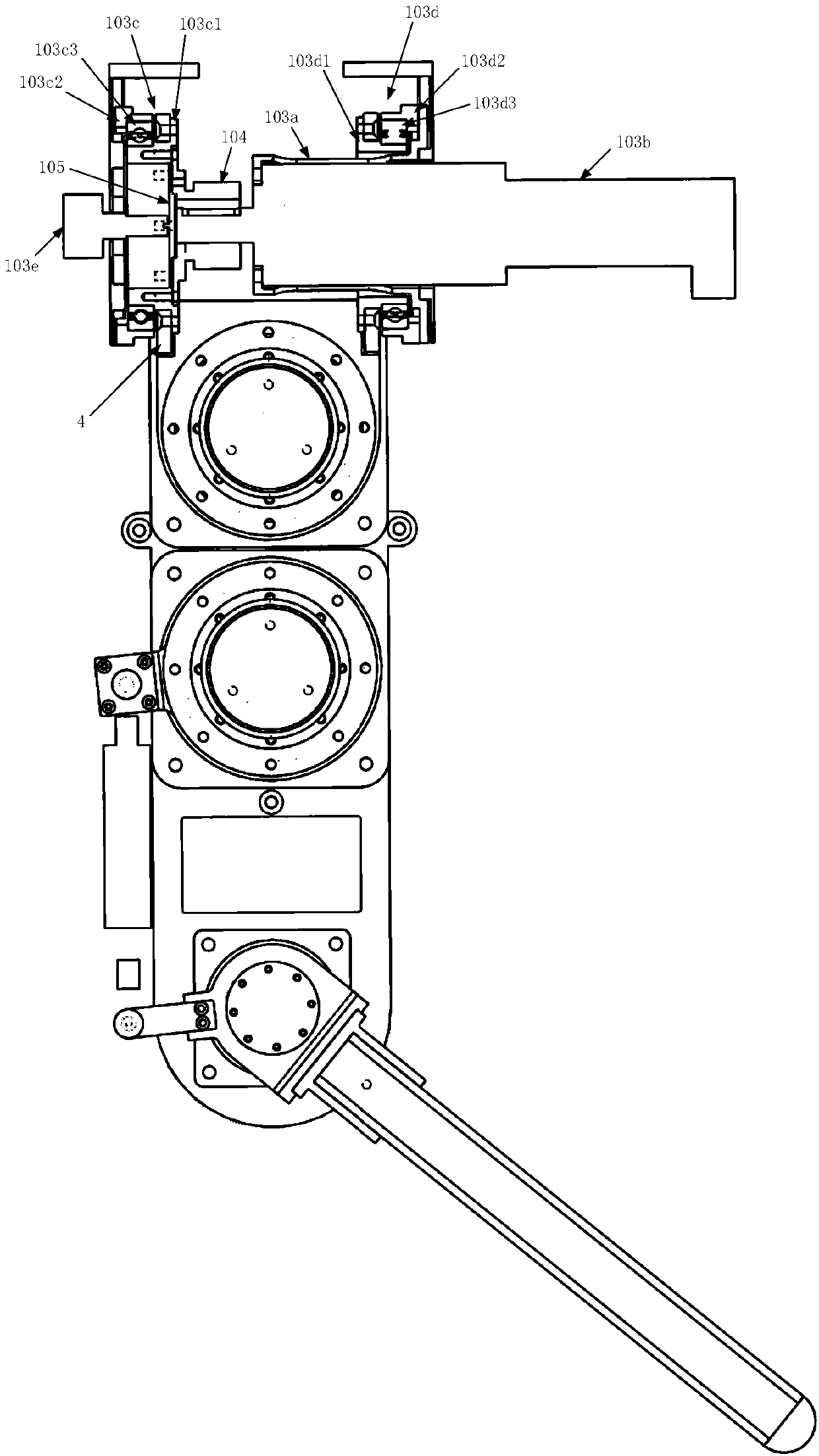
[0034] The hip part 1 is directly fastened to the legged robot body. Hip part 1 adopts compact structure, comprises left connecting plate 101, right connecting plate 102 and hip driving mechanism 103, as figure 2 shown. Hip driving mechanism 103 comprises motor housing 103a, motor 103b, left bearing assembly 103c, right bearing assembly 103d and potentiometer 103e, as image 3 shown. Wherein, the motor casing 103a is fastened on the right connecting plate 102 by bolts, and the motor casing 103a utilizes the space of the motor reduction box, and is connected with the reduction box part casing of the motor 103b by bolts without changing the strength. ; Through t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More