

Rapid vision positioning method and system based on SCARA robot
A visual positioning and robot technology, applied in the field of image recognition, can solve the problems of long matching time and low target position accuracy, and achieve the effect of accelerating positioning, enhancing stability and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
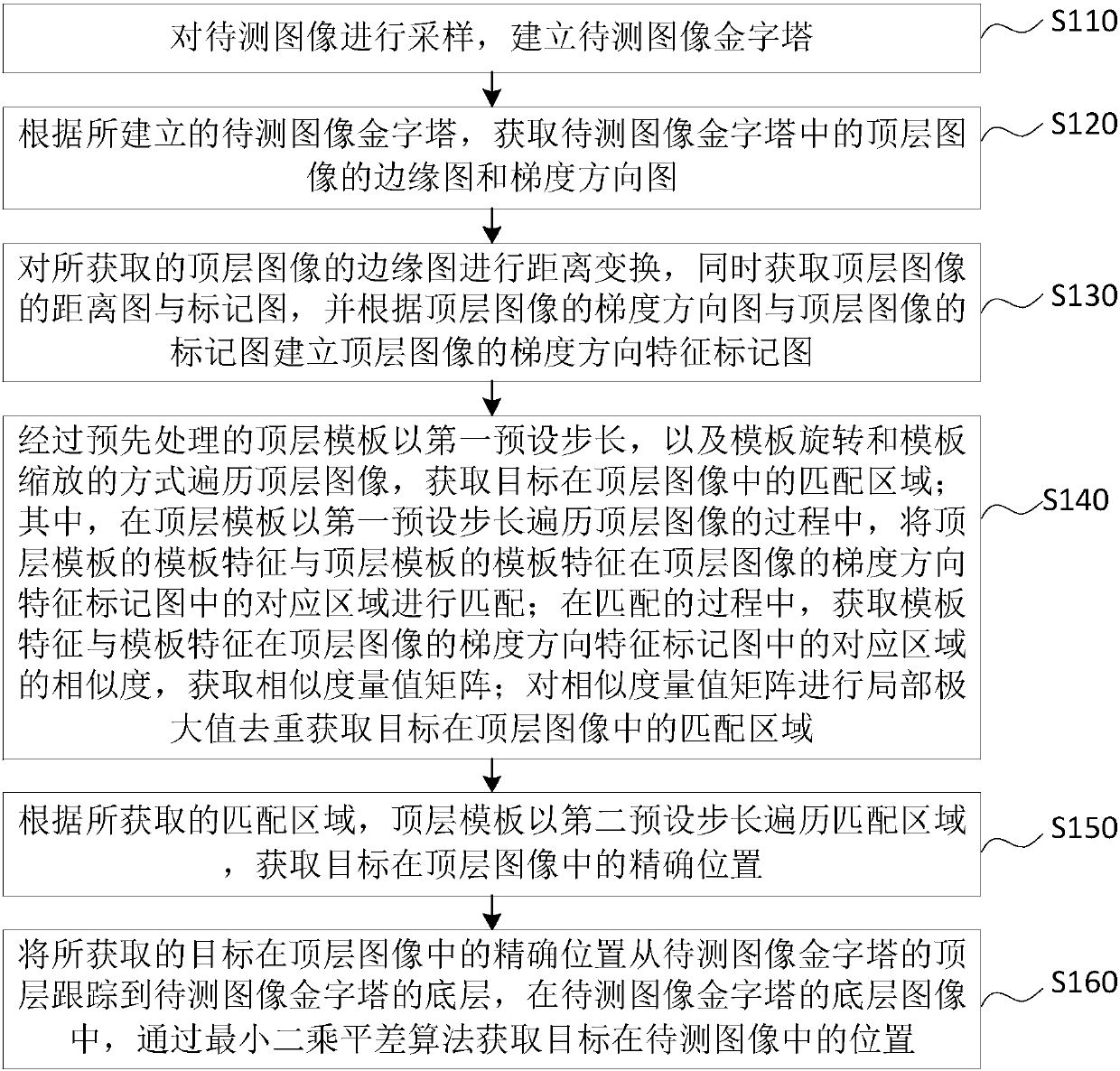
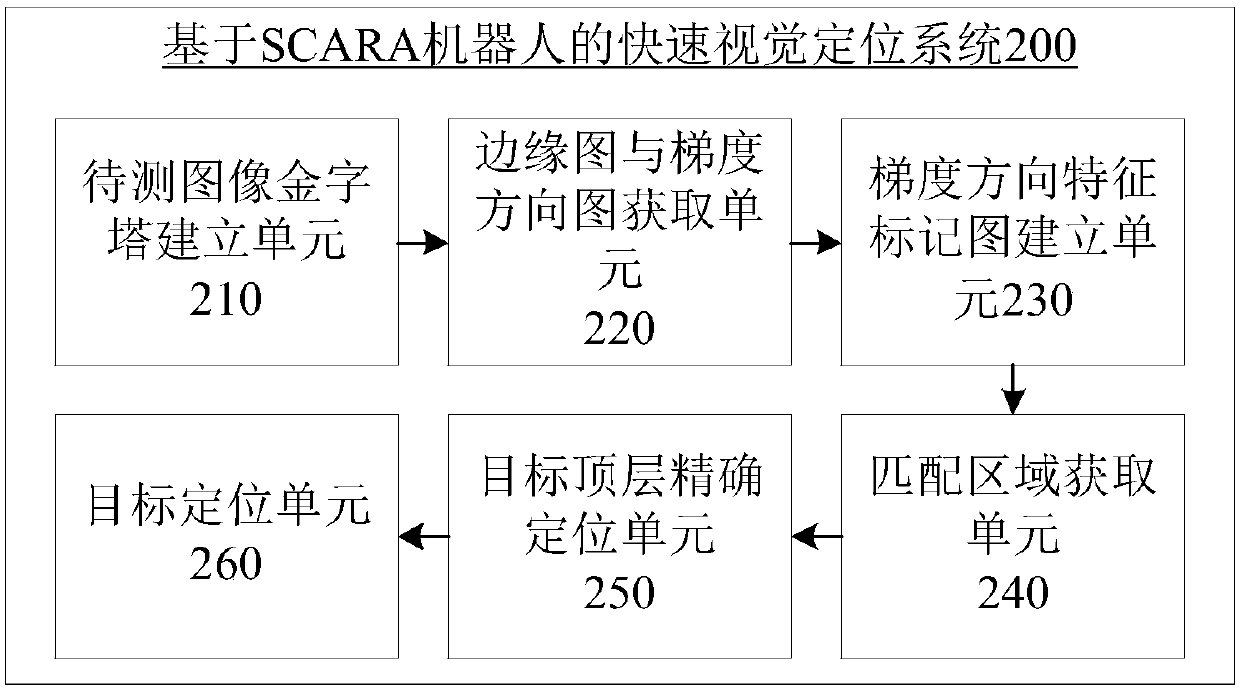
[0039] In view of the foregoing, the existing visual positioning of the robot has the problems of long matching time and low target position accuracy. The present invention first establishes an image pyramid, and then uses the gradient direction map of the top-level image and the distance transformation of the edge map of the top-level image The obtained label map establishes the gradient direction feature label map of the top-level image; in the process of the top-level template traversing the top-level image with the first preset step size, the features of the top-level template and the template features of the top-level template are combined in the gradient direction feature of the top-level image Match the corresponding area in the mark map, obtain the similarity metric matrix during the matching process, and obtain the matching area of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More