

Automatic parking path obstacle collision detection method, device and system
A technology for collision detection and automatic parking, which is applied in motor vehicles, control devices, control/regulation systems, etc., can solve the problems of low detection efficiency and difficult to meet, and achieve the effect of reducing requirements, being easy to implement, and improving computing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0069] A method for collision detection of obstacles in an automatic parking path, the method comprising the following steps:
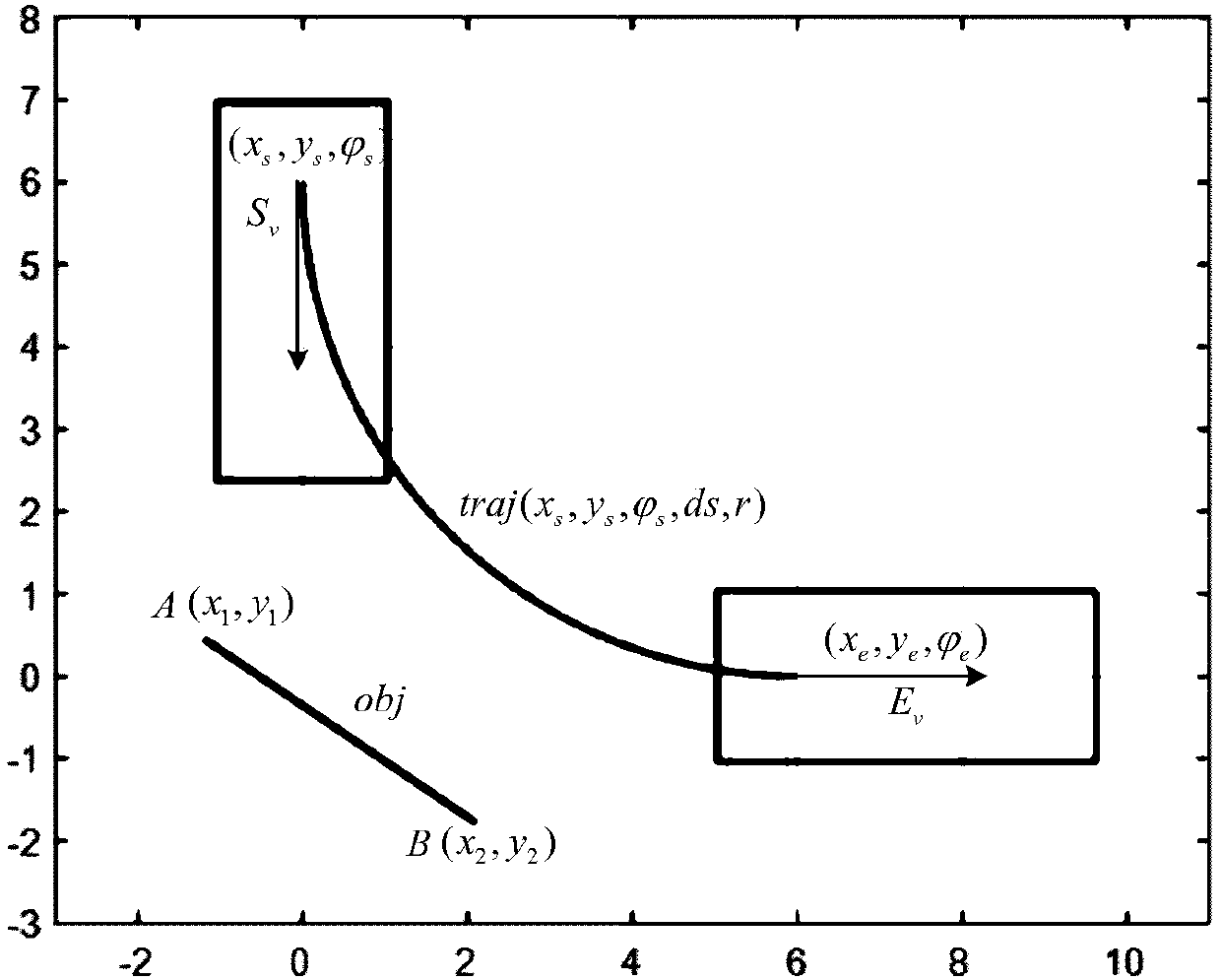
[0070] Using the path profile, vehicle profile and obstacle profile, geometrically perform circular path obstacle collision detection and / or straight path obstacle collision detection;
[0071] Wherein, the path profile is a boundary profile formed by the vehicle traveling along the path from the start point pose to the end point pose, the path profile includes an arc-shaped path profile and / or a straight line path profile, and the vehicle profile is Polygon, the outline of the obstacle is a line segment.
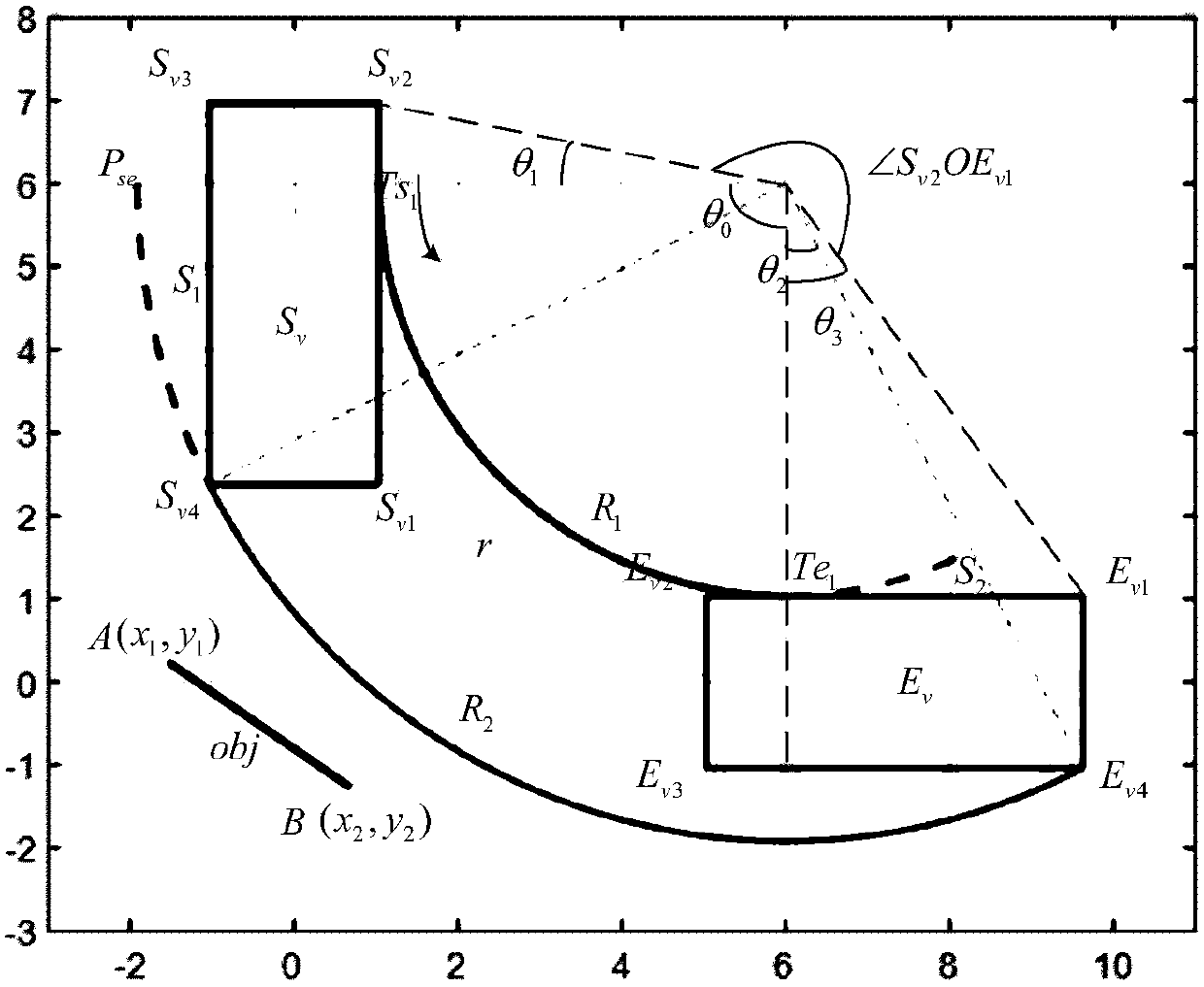
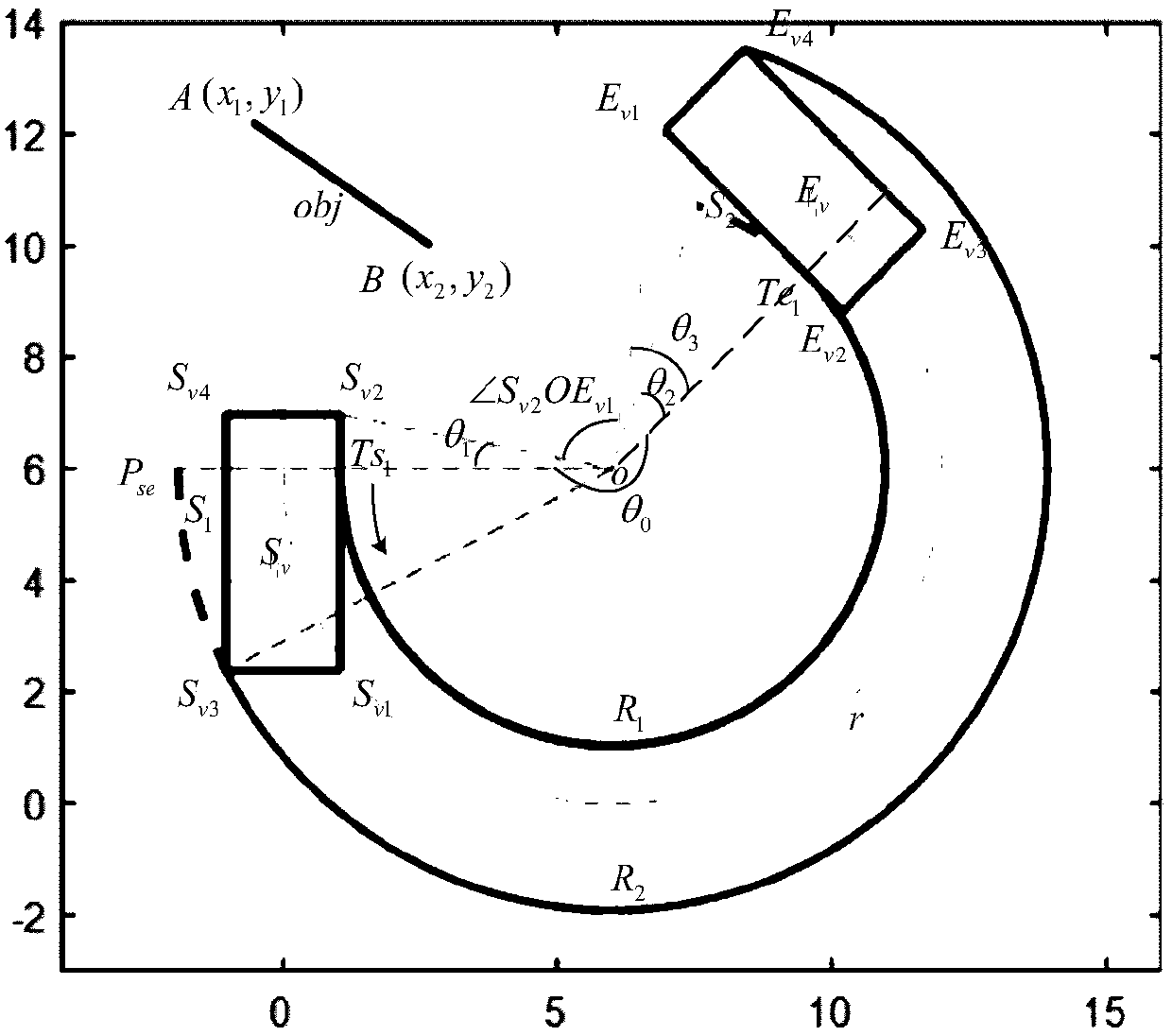
[0072] Further as a preferred embodiment of the method of the present invention, the step of using the path profile, the vehicle profile and the obstacle profile to geometrically perform the collision detection of the arc-shaped path obstacle includes the following sub-steps:
[0073] Judging whether the obstacle meets the obvious non-collision co...
Embodiment 2
[0109] A device combining software and hardware corresponding to the above method, an automatic parking path obstacle collision detection device, the device includes:
[0110] Memory for storing various programs;
[0111] Processor, which loads the program and performs the following steps:
[0112] Using the path profile, vehicle profile and obstacle profile, geometrically perform circular path obstacle collision detection and / or straight path obstacle collision detection;
[0113] Wherein, the path profile is a boundary profile formed by the vehicle traveling along the path from the start point pose to the end point pose, the path profile includes an arc-shaped path profile and / or a straight line path profile, and the vehicle profile is Polygon, the outline of the obstacle is a line segment.
Embodiment 3
[0115] A soft system corresponding to the above method, an automatic parking path obstacle collision detection system, the system includes:
[0116] a collision detection module for geometrically performing circular path obstacle collision detection and / or straight path obstacle collision detection using path contours, vehicle contours and obstacle contours;
[0117] Wherein, the path profile is a boundary profile formed by the vehicle traveling along the path from the start point pose to the end point pose, the path profile includes an arc-shaped path profile and / or a straight line path profile, and the vehicle profile is Polygon, the outline of the obstacle is a line segment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More