

Regular graphic code used for locating indoor mobile robot and locating method
A graphic code and rule technology, applied in the direction of equipment, image enhancement, image analysis, etc., can solve the problems of low efficiency of long-distance recognition, inability to quickly locate and identify long-distance, and solve the problems of inability to quickly locate and identify long-distance, The effect of improving efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The following examples refer to Figure 1-2 .
[0028] Structure example:
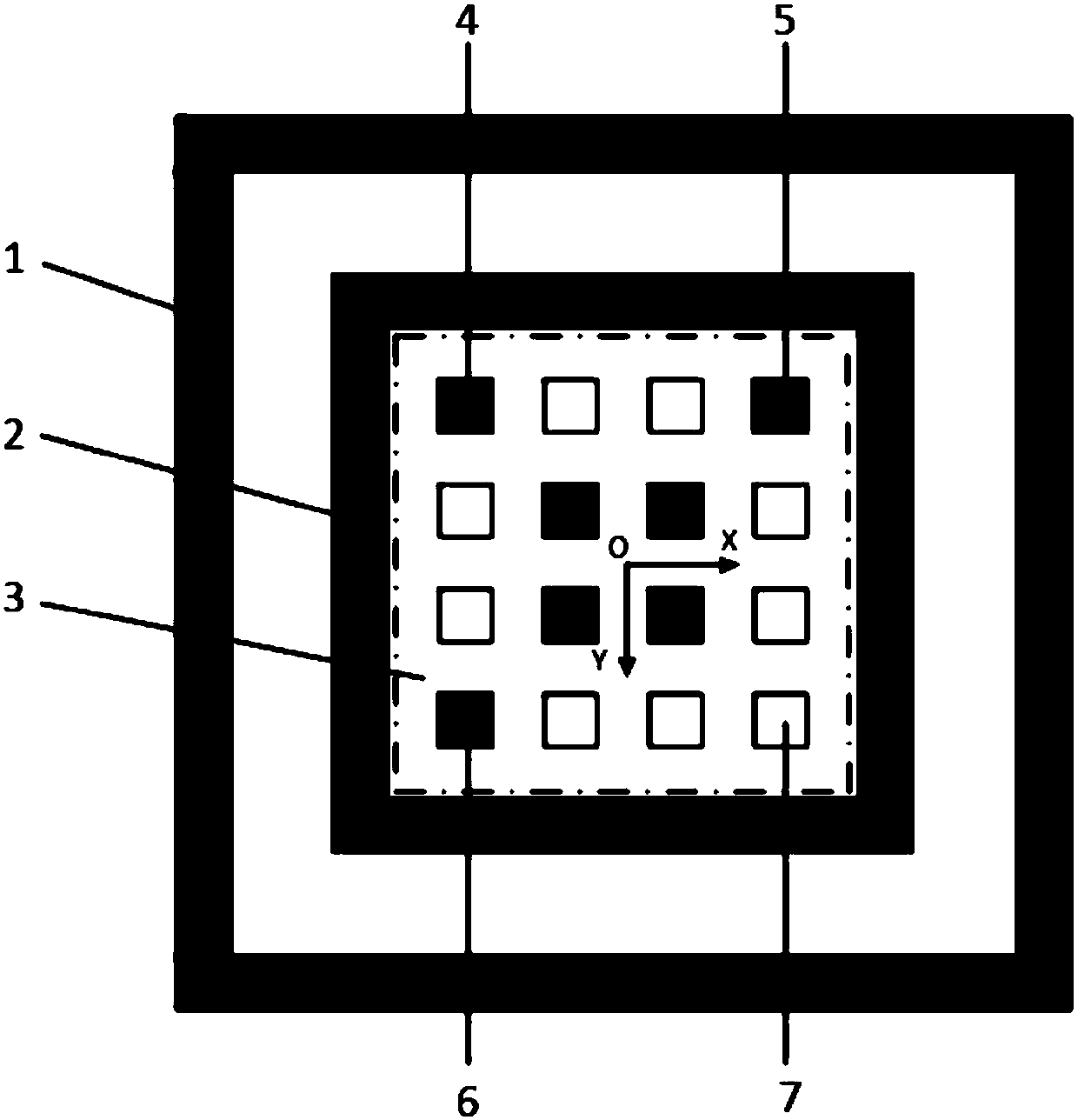
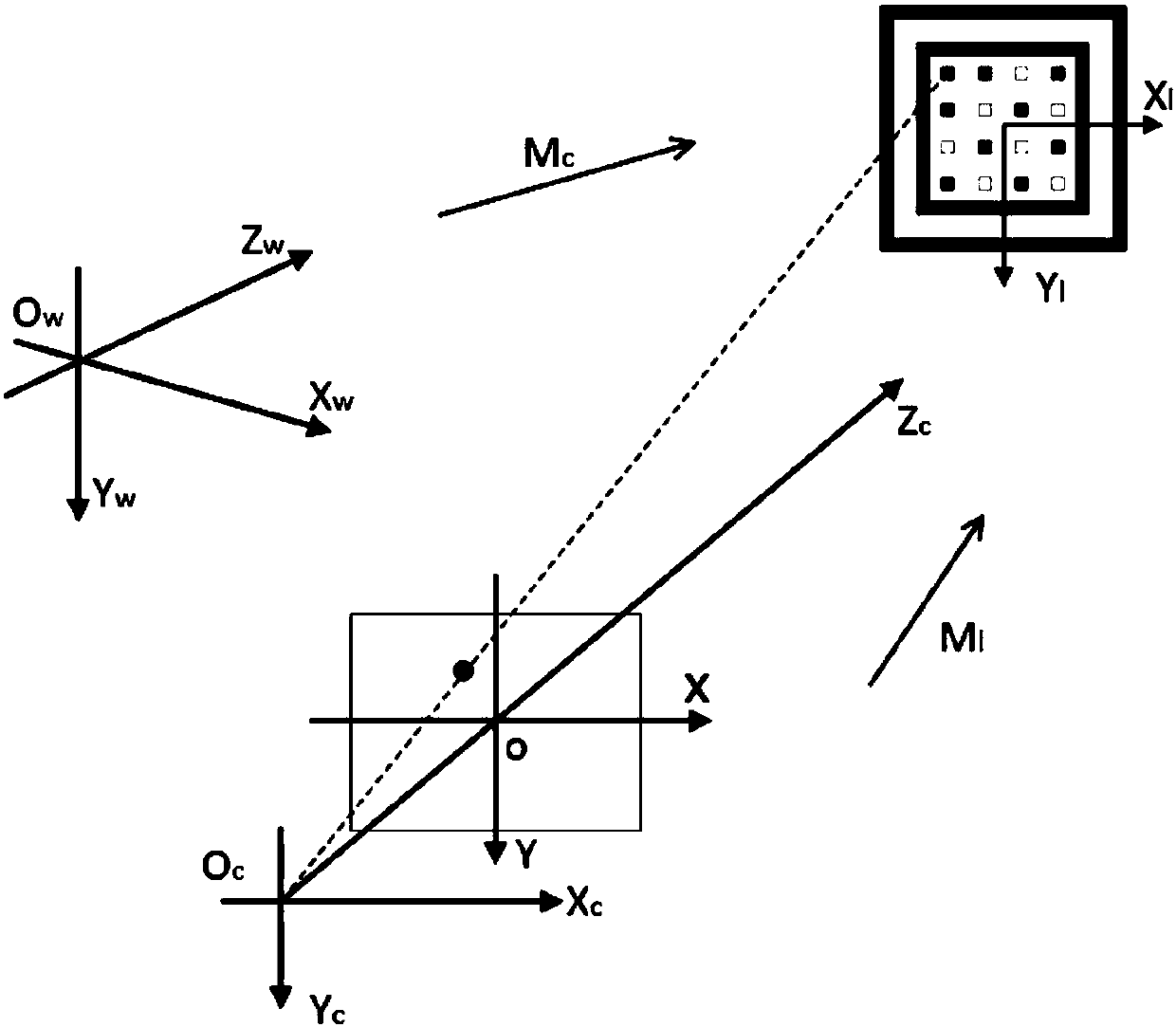
[0029] The regular graphic code of the present invention includes two parts, a position detection graphic and a two-dimensional dot matrix coding area, wherein the recognition principle of the position detection graphic is similar to that of a general two-dimensional code, and is used for long-distance positioning of the regular graphic code, and for detecting the inside of the graphic The two-dimensional dot matrix coding area of is used to store the pose information of the regular graphic code in the world coordinate system.
[0030] The position detection pattern in the regular graphic code is the outer back-shaped area of the regular graphic code, which is composed of two concentric outer squares 1 and inner squares 2 in the same direction, and the corresponding sides of the inner and outer squares 2 and the middle white The gaps form black and white stripes, and the width ratio of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More