

Portable dynamic joint device, lower limb assist exoskeleton equipment and control method thereof
A power device, portable technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of complex power joint design, strict installation accuracy requirements, high cost, and simplify the mechanical structure design complexity and selection. Wide range of adaptability and improved morphological performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to fully understand the technical content of the present invention, the technical solutions of the present invention will be further introduced and illustrated below in conjunction with specific examples, but not limited thereto.
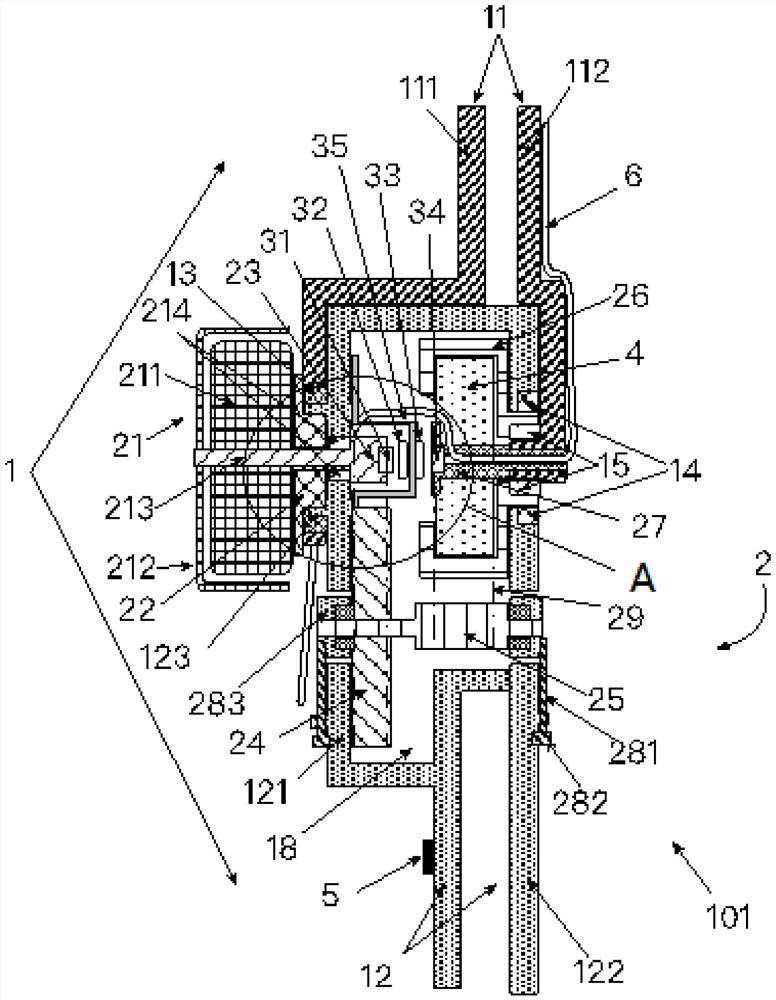
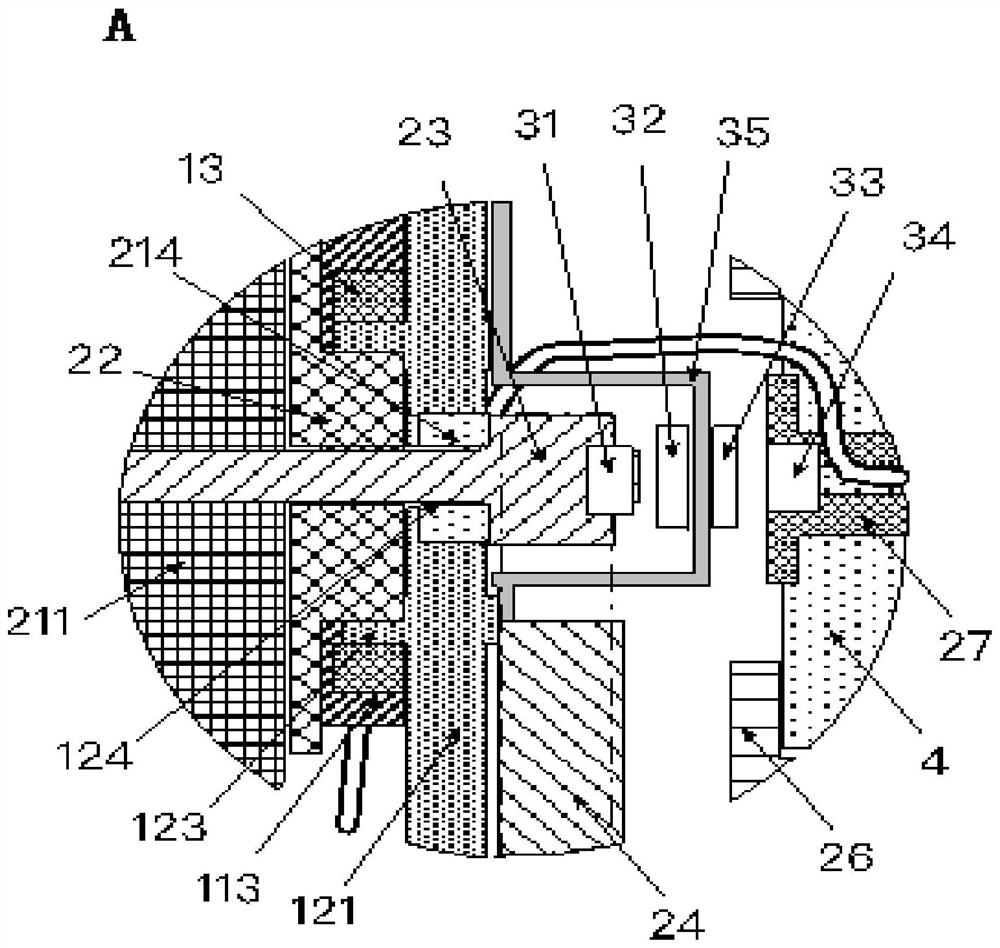
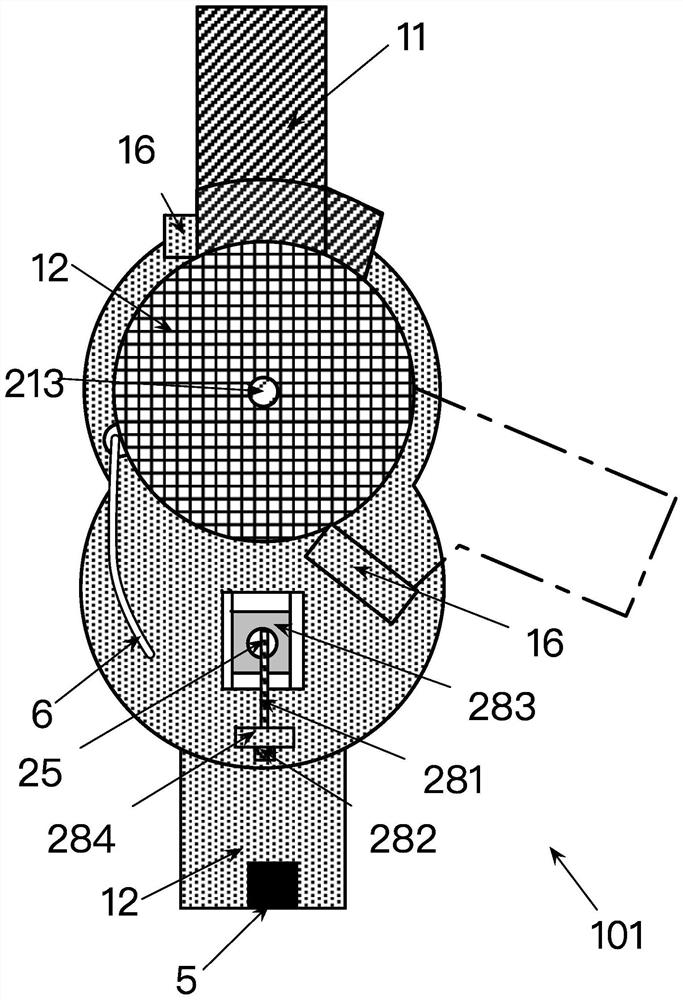
[0043] Such as figure 1 — Figure 6 Shown is a specific structural view of an embodiment of a portable dynamic joint device of the present invention.
[0044] A portable dynamic joint device, such as figure 1 — image 3 As shown, it includes a joint main body 1 and a power device 2 arranged outside the joint main body 1 . The joint body 1 includes an upper arm 11 and a lower arm 12 rotatably coupled with the upper arm 11 . The upper arm 11 or the lower arm 12 is provided with a mounting cavity 18 . The power device 2 is provided with a transmission mechanism 20 inside the installation cavity 18 . The power device 2 is fixed on the lower arm 11 or the upper arm 12 , and drives the upper arm 11 or the lower arm 12 to rotate throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More