

A cucumber flexible picking manipulator end effector and picking method
An end-effector and manipulator technology, applied in manipulators, agricultural machinery and implements, harvesters, etc., can solve the problems of easy clamping, easy breakage, low degree of mechanization, etc., to ensure non-destructive picking, strong adaptability, Shake avoidance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and the protection scope of the present invention is not limited to the following specific embodiments. .
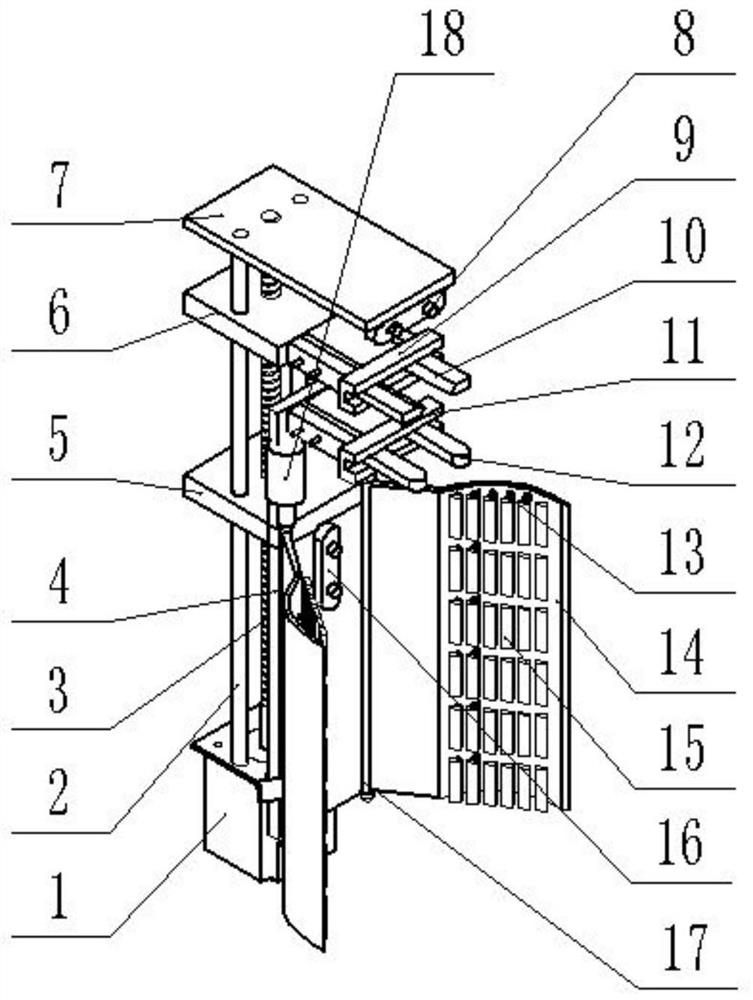
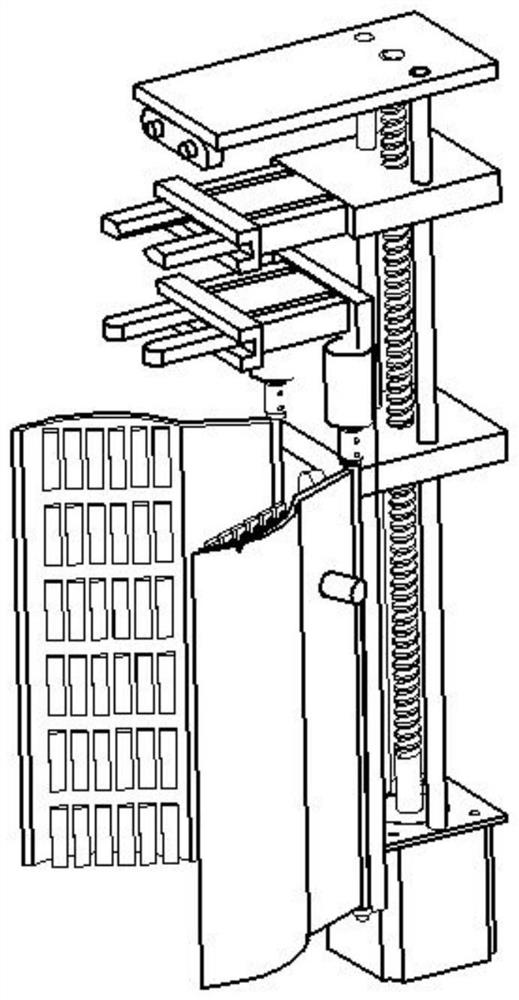
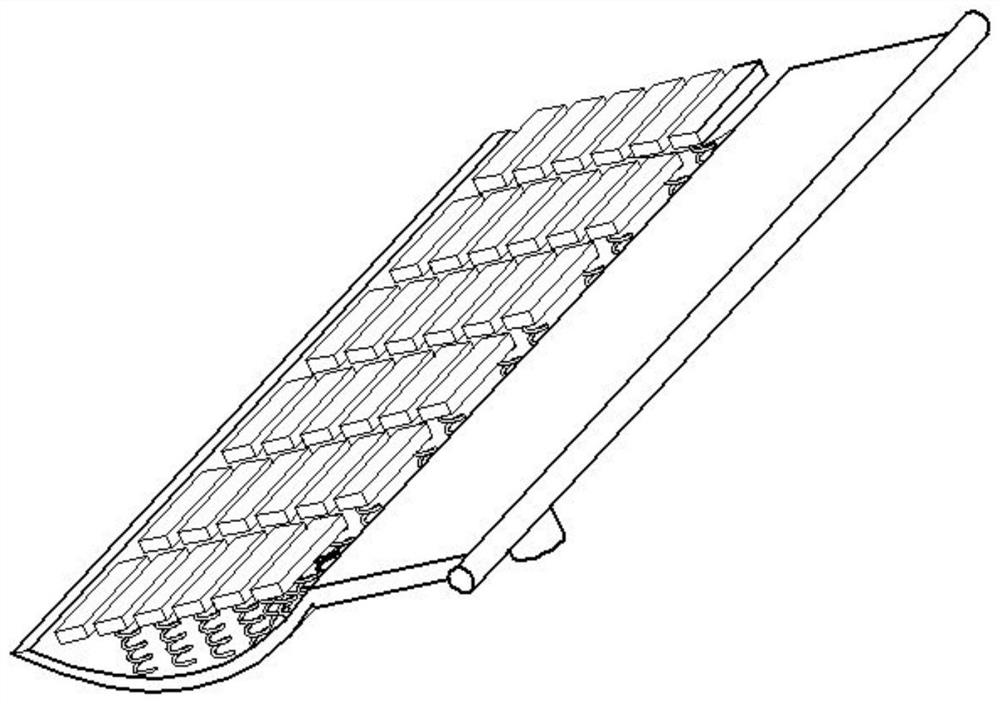
[0028] A cucumber flexible picking manipulator end effector and picking method designed in the present invention use a multi-joint manipulator to acquire and sense the working environment and cucumber information in real time through multi-sensor information fusion to ensure that the cucumber is aligned without damaging the cucumber , close to the cucumber, clamp the upper section of the cucumber, flexibly clamp the middle and lower sections of the cucumber, and cut off the fruit stem. The present invention adopts flexible clamping walls to flexibly clamp the middle and lower sections of the cucumber, clamp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More