

High-simulation robot head structure and motion control method thereof
A technology of simulating robots and robots, which is applied in the field of robots, can solve the problems of incapable of novel and interesting consumption experience, stiff facial expressions, lack of human interaction functions, etc., and achieve the effect of real and vivid service experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
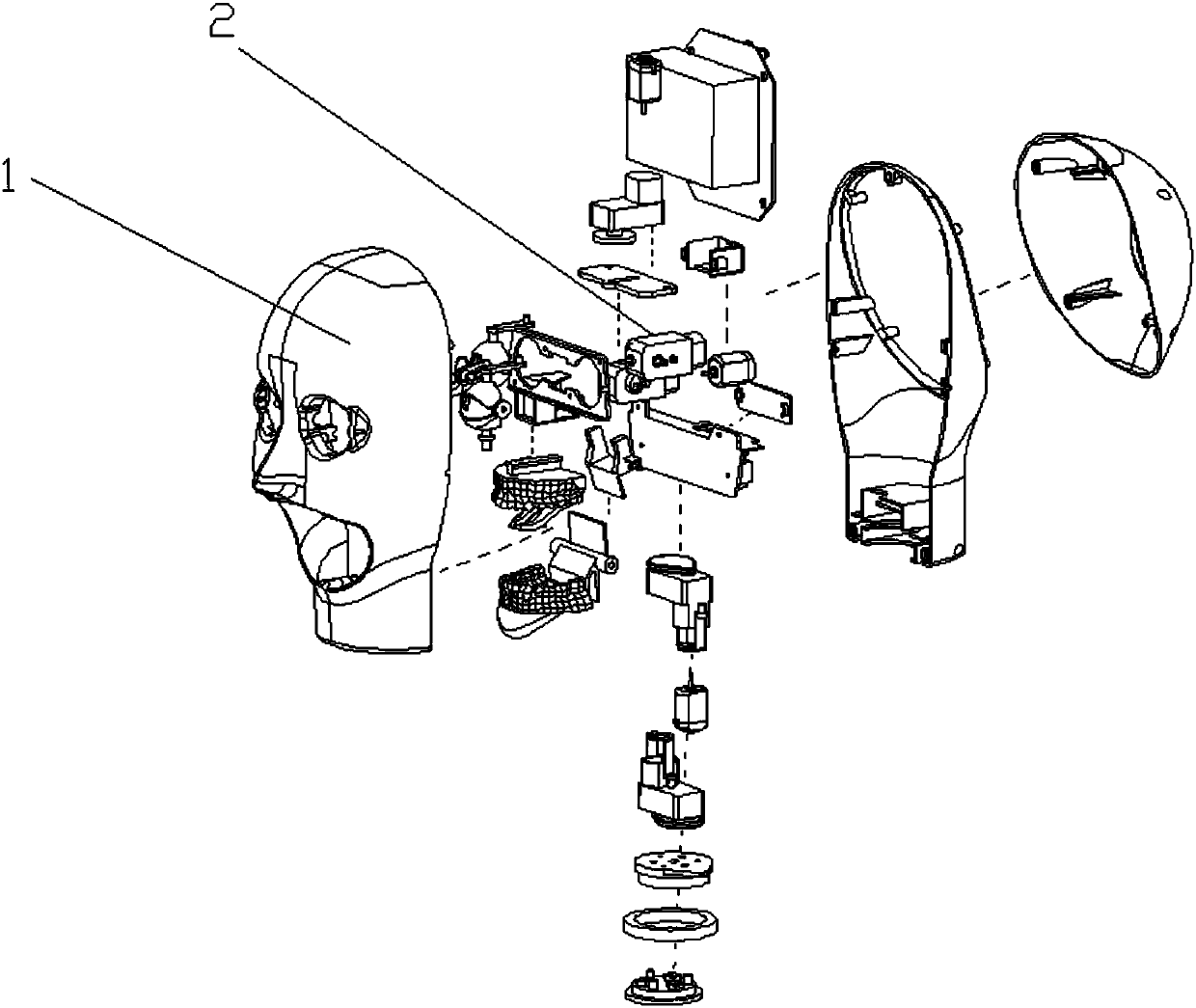
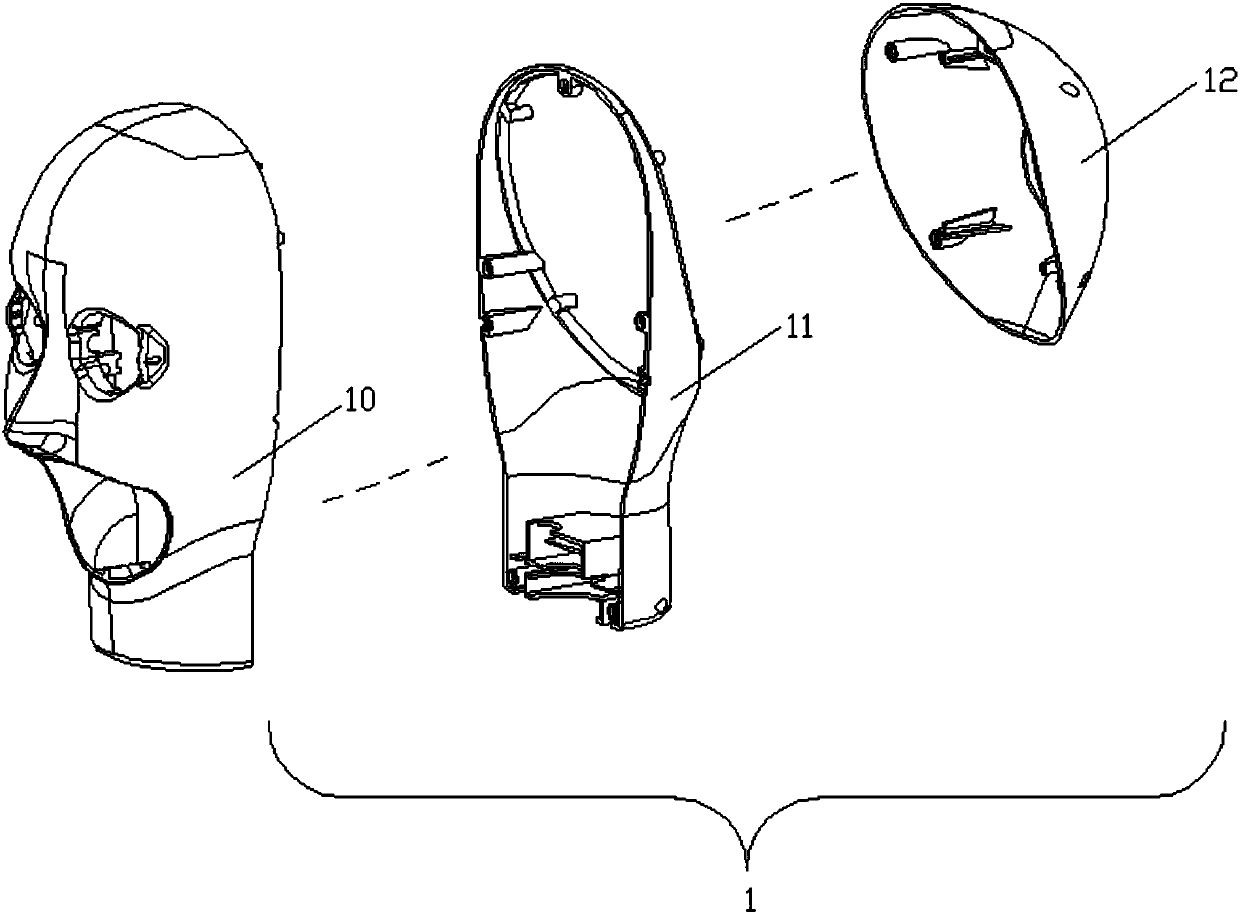
[0060] refer to Figure 1 to Figure 5 , the highly simulated robot head structure and operating system includes a shell component 1 , a facial movement component 2 and an internal control component 3 arranged inside the shell component 1 .
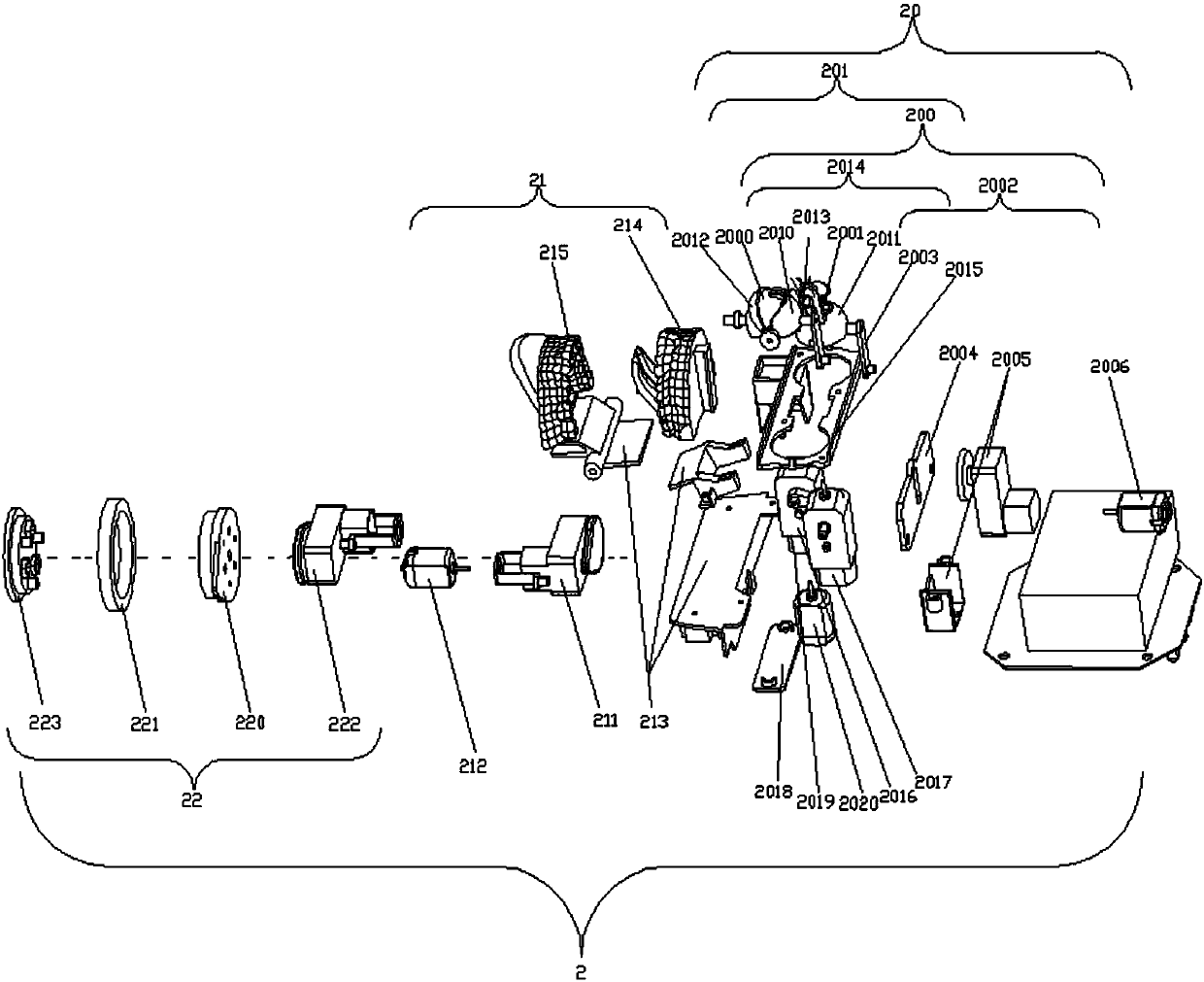
[0061] The facial movement assembly 2 includes an eye assembly 20 and a mouth assembly 21 , and the eye assembly 20 specifically includes an eyeball assembly 200 and an eyelid assembly 201 .
[0062] Wherein, the eyeball assembly 200 is connected with the internal control assembly 3 through the eyeball transmission assembly 2002 provided with the first motor 2006; connect.
[0063] The mouth assembly 21 is connected with the internal control assembly 3 through the fourth motor 212 inside the mouth assembly 21 .
[0064] Described internal control assembly 3 comprises main processor 30 and the active control assembly that is connected with main processor 30 respectively, external induction module 33, voice module 32, database module 35 an...
Embodiment 2
[0071] refer to image 3 , the eyelid assembly 201 includes an upper left eyelid 2010 and a lower left eyelid 2012 arranged on the left eyeball 2000 ; an upper right eyelid 2011 and a lower right eyelid 2013 arranged on the right eyeball 2001 .
[0072] The eyelid assembly 201 fully imitates the eyelid structure of a real person, and is provided with an upper left eyelid 2010, a lower left eyelid 2012, an upper right eyelid 2011, and a lower right eyelid 2013. Two motors control the eyelid assembly 201, that is, the second motor 2017 controls the upper left eyelid 2010 and the upper right eyelid 2011, and the third motor 2020 controls the lower left eyelid 2012 and the lower right eyelid 2013, so that the degree of simulation is significantly improved, and the facial expressions are more vivid. stiff.
[0073] refer to image 3 , the upper and lower eyelid transmission assembly 2014 also includes the upper eyelid gear box 2016 connected with the second motor 2017; the upper ...
Embodiment 3
[0076] refer to image 3 , the mouth assembly 21 also includes a mouth core wheel 211 connected with the fourth motor 212; a mouth gear 210 connected with the mouth core wheel 211; a mouth transmission member 213 connected with the mouth gear 210; The upper gear part 214 and the lower gear part 215 connected by the upper transmission part 213 .
[0077] The fourth motor 212 drives the mouth core wheel 211 to rotate, thereby driving the mouth gear 210, and the mouth gear 210 drives the mouth transmission part 213, so that the mouth transmission part 213 drives the upper gear part 214 and the lower gear part 215 to simulate The opening and closing of the human mouth.
[0078] refer to image 3 , the neck assembly 22 comprises a neck gear box 222; a neck rotating part 220 connected with the neck gear box 222; a neck butt joint 221 connected with the neck turning part 220; a neck pressing part connected with the neck joint 221 223.
[0079] A motor can be installed on the exte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More