

Heterogeneous multi-AUV system task coordination method under time window constraints
A system task and coordination method technology, applied in the field of multi-AUV task coordination, can solve the problems of high dynamic complexity of a single robot system, the intelligent level of the robot system is difficult to reach the multi-robot system, etc., and the optimization process is simple Fast, the effect of improving the efficiency of task execution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the accompanying drawings.
[0057] The present invention is a task coordination method for a heterogeneous multi-AUV system based on an ant colony algorithm. The specific implementation of the algorithm will be described below by taking 4 task sea areas, 2 slave AUVs, and 2 task types as examples.
[0058] S1: The details of the data to be uploaded to the surface workbench are as follows: Figure 6-11 As shown in , the coordinates of the task sea area are randomly generated three-dimensional coordinate matrix, which will not be described here.
[0059] S2: The main control AUV processes the uploaded data and divides tasks such as Figures 12 to 14 Shown:
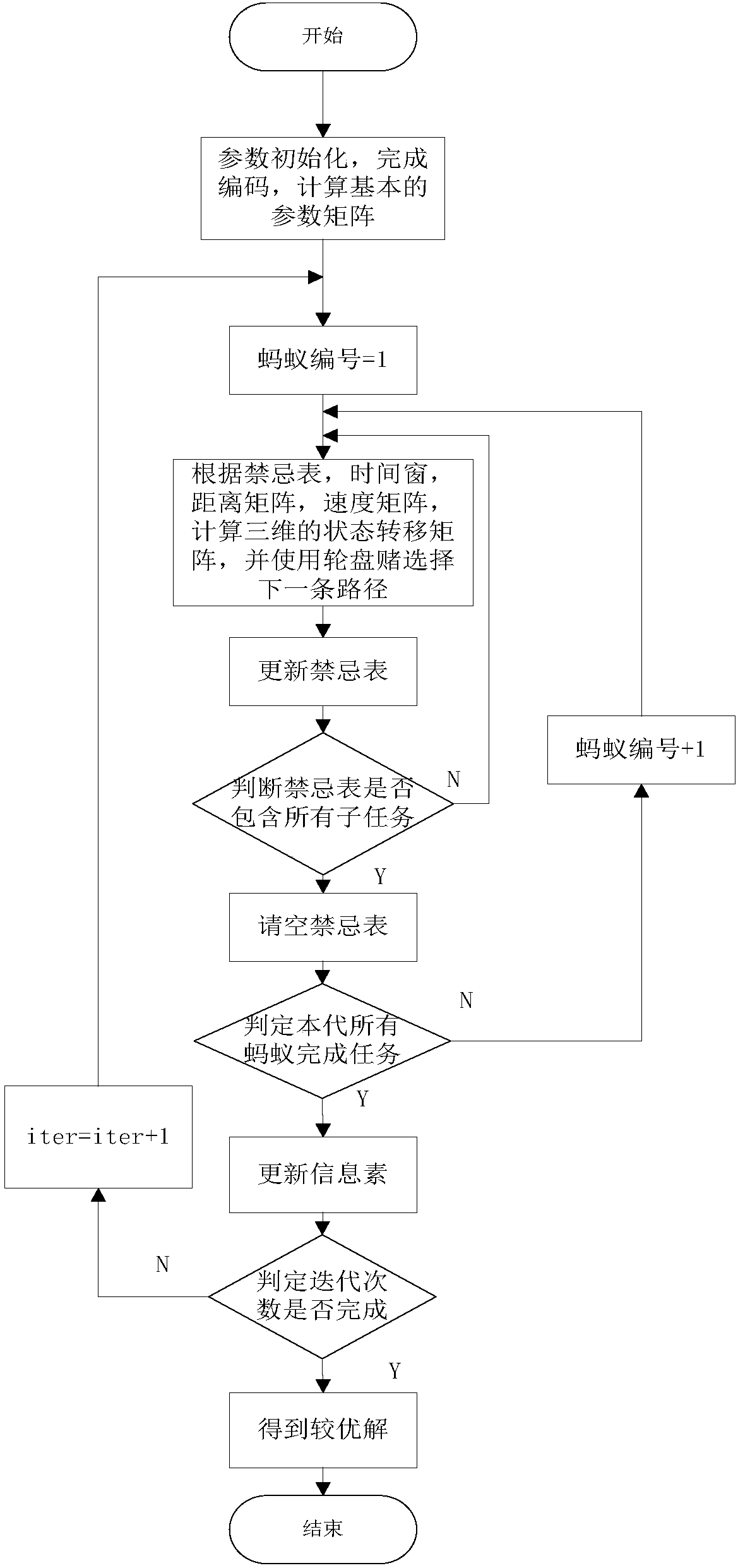
[0060]S3: After processing the above data, the surface workbench starts to use the ant colony algorithm to optimize the task coordination problem of the slave AUV.
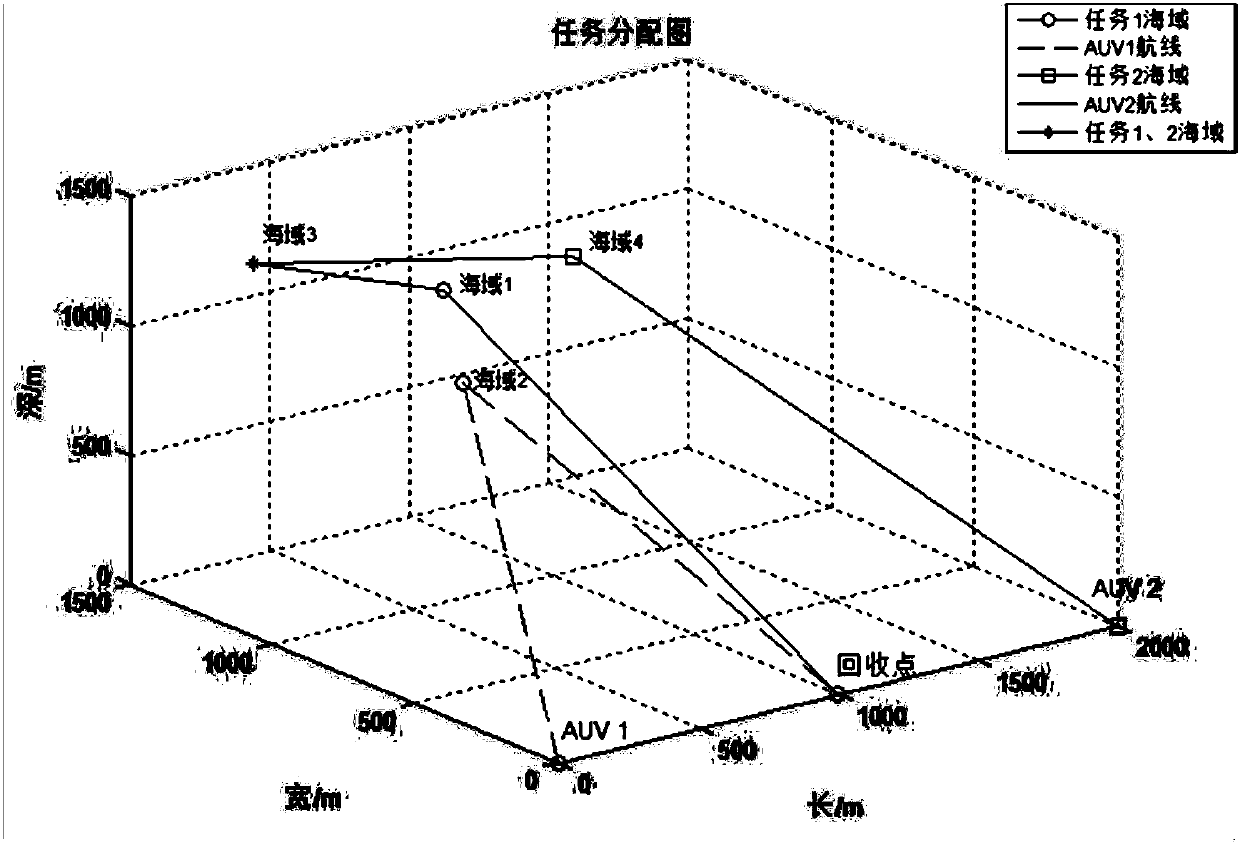
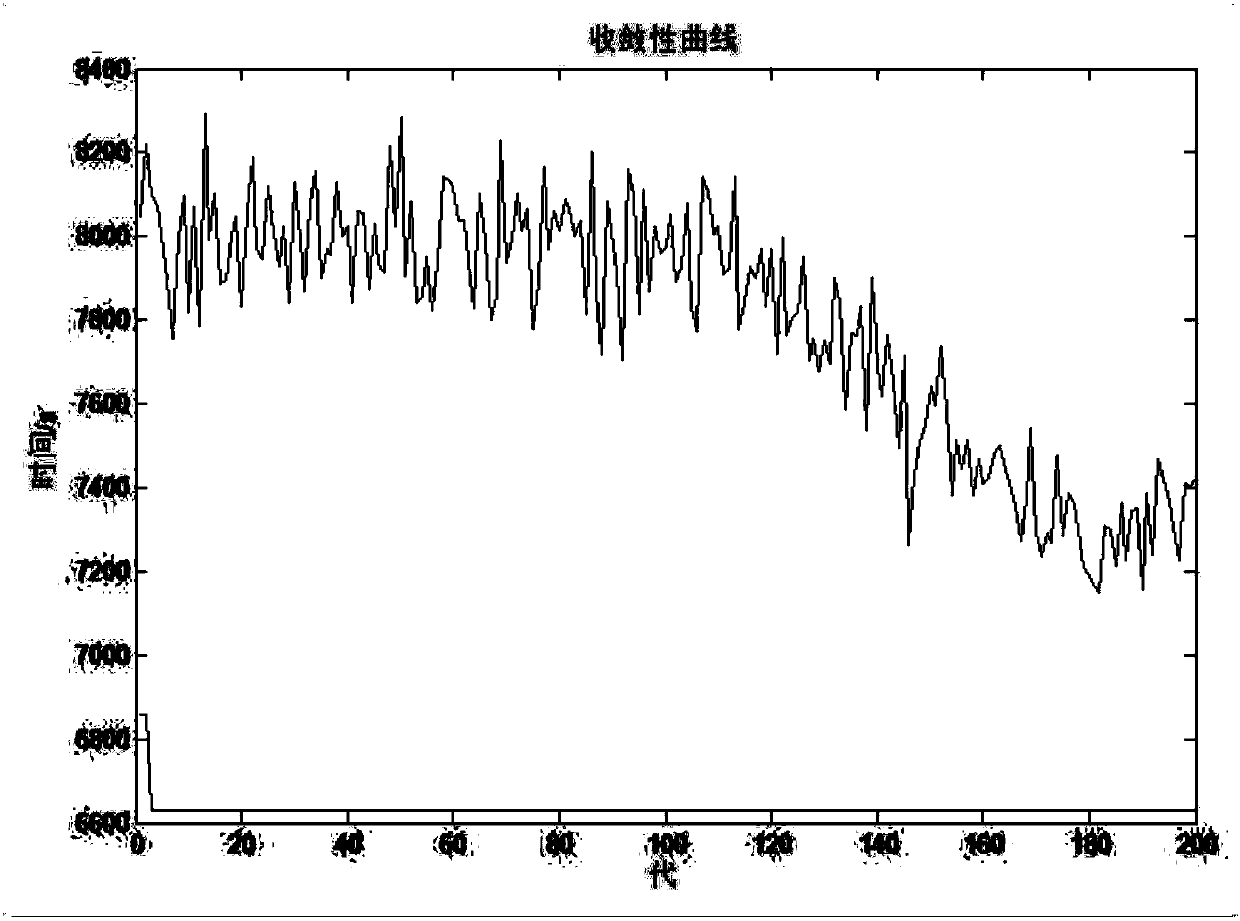
[0061] S4: The task allocation plan and execution sequence of each AUV obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More