

Robot control device
A technology of control devices and robots, applied in the direction of program control, general control system, control/regulation system, etc., can solve the problems of decreased tracking accuracy and deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Hereinafter, embodiments of the robot system according to the present invention will be described in detail with reference to the drawings. It should be noted that, in this manual, the ^ symbol above the English letters means "(English letters) hat ", the bar symbol added above the English letter means "(English letter) bar ", the dot symbol marked on the top of the English letter means "(English letter) dot ".
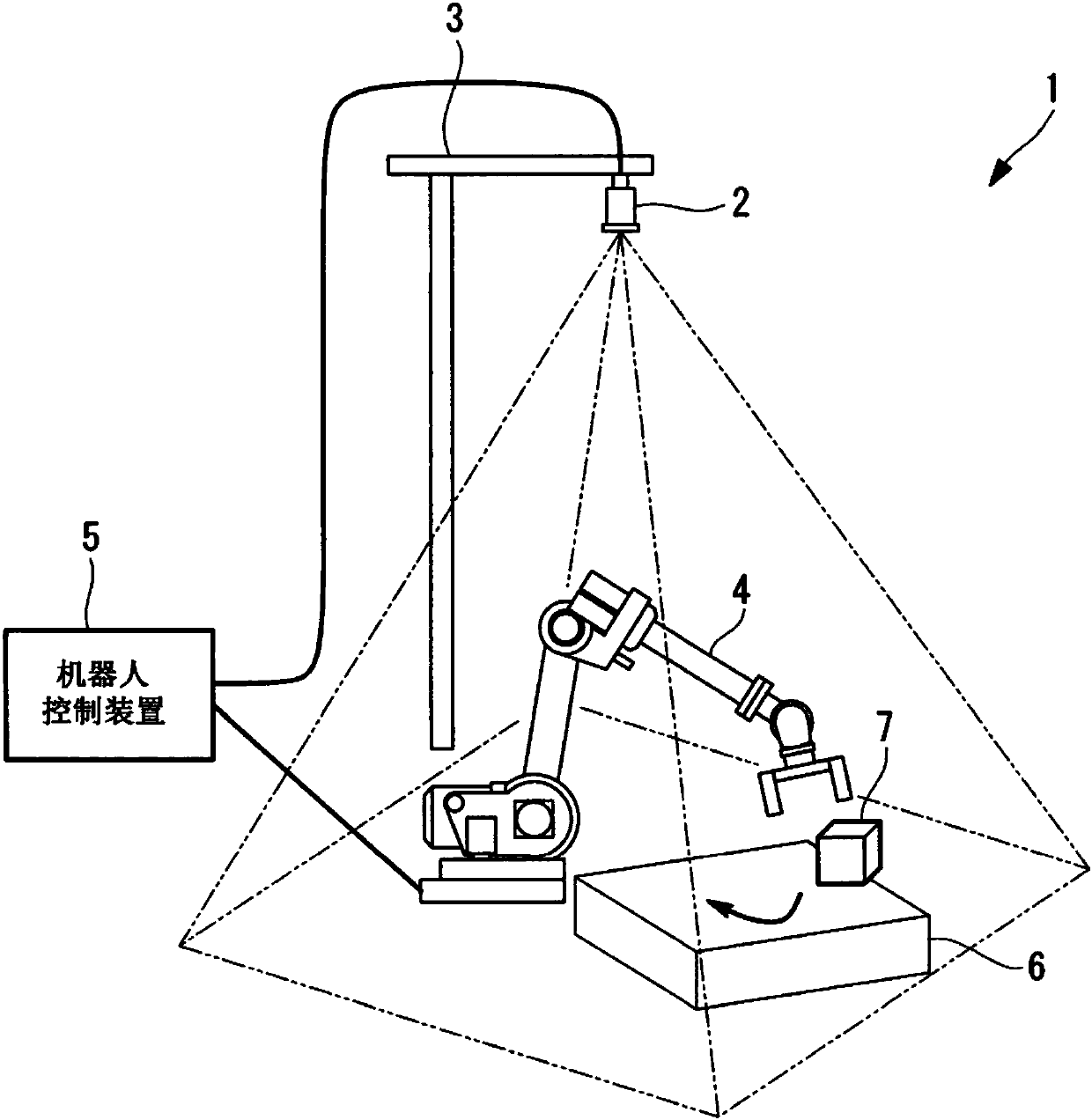
[0028] Such as figure 1 It is shown that the robot system 1 of this embodiment has a camera 2 , a bracket 3 for supporting the camera 2 , a robot arm 4 , and a robot control device 5 to which the camera 2 and the robot arm 4 are connected. The robot controller 5 is configured to perform visual servoing control based on the visual information acquired from the camera 2 so that the robot arm 4 follows the movement of the workpiece (object) 7 .
[0029] The workpiece 7 is placed on a conveying device 6 such as a conveyor belt or a rotary table, and the workpie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More