

A method and system for collaborative planning of target attitude for multi-level composite control of spacecraft
A target attitude and compound control technology, which is applied in attitude control, space navigation equipment, space navigation aircraft, etc., can solve the periodic error fluctuation of load attitude control, obvious non-smooth characteristics of load target attitude and target angular velocity, and unfavorable load. Ultra-high stability control and other problems, to achieve the effect of simple planning method, satisfying computing power, and high-precision tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
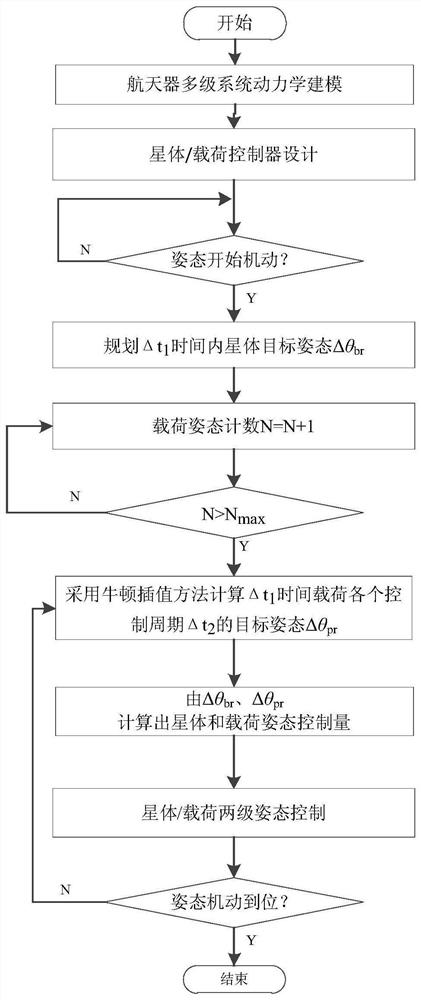
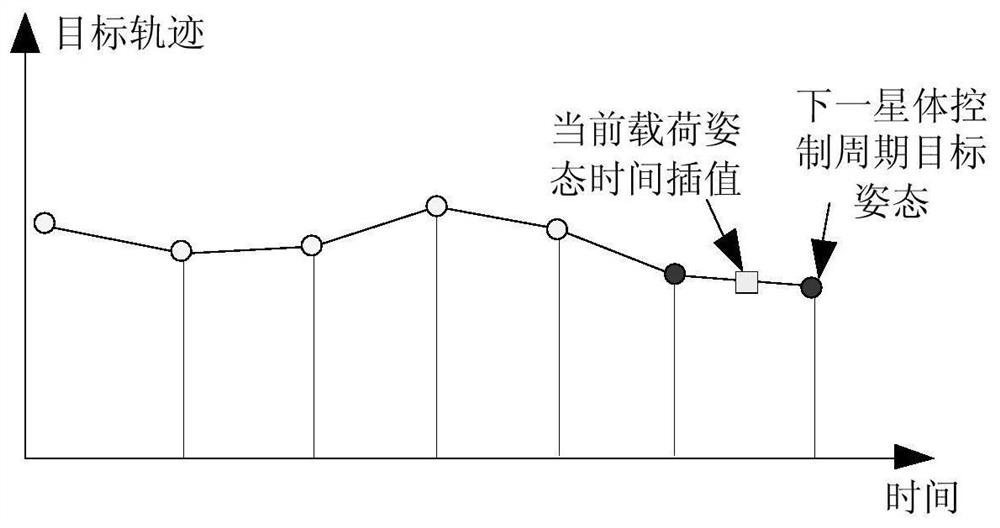
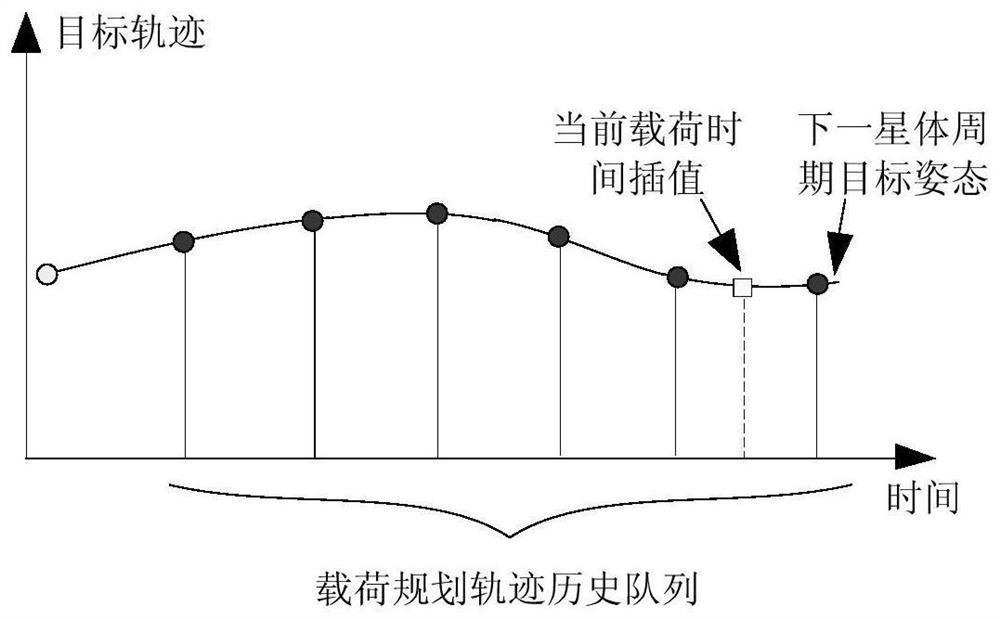
[0092] The present invention is a method and system for multi-stage composite control of a target attitude collaborative planning of a spacecraft, which is suitable for space-based astronomical observations, extremely high-resolution earth observations, etc., which require ultra-high-precision pointing control of loads, ultra-high stability, and ultra-agile control requirements. field. The designed spacecraft multi-level composite control system includes the first-level control system of the star and the second-level control system of the payload. The payload and the star are required to track the same target attitude during the large-angle agile maneuvering of the spacecraft. Since the star controls the period Δt 1 and load control period Δt 2 Different (Δt 2 ﹤﹤Δt 1 ), it is necessary to use the interpolation method to calculate the loa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More