

Self-removing robot
A self-moving and robotic technology, applied in the direction of manipulators, motor vehicles, manufacturing tools, etc., can solve problems such as unstable operation, failure to pass obstacles smoothly, and dead spots in the obstacle crossing angle, and achieve a compact and reasonable structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0040] It can be known from the above that the self-propelled robot provided by the present invention triggers and activates the secondary drive wheel assembly through contact between the trigger end and an obstacle, which belongs to mechanical triggering. For those skilled in the art, it is also possible to realize the assisted obstacle surmounting of the self-mobile robot through other alternative mechanisms.
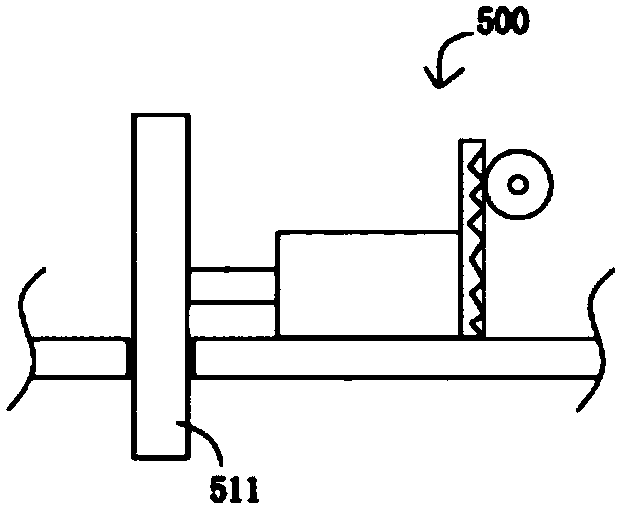
[0041] Figure 7 It is a schematic diagram of a partial structure of a gear transmission assembly in Embodiment 2 of the present invention. Such as Figure 7 As shown, the connecting rod assembly of the self-mobile robot can be slidably arranged on the body 1000 or the main driving wheel assembly 200, and a gear transmission assembly 600 is provided between the trigger mechanism and the connecting rod assembly; The end is lifted up after encountering an obstacle, so that the gear transmission assembly rotates and drives the connecting rod assembly to slide downward,...
Embodiment 3
[0044] Figure 8 It is a schematic diagram of a partial structure of a hydraulic transmission assembly in Embodiment 3 of the present invention. Such as Figure 8 As shown, the connecting rod assembly of the self-mobile robot can be slidably arranged on the body 1000 or the main driving wheel assembly 200, and a hydraulic transmission assembly 700 is provided between the trigger mechanism and the connecting rod assembly; The end is lifted up after encountering an obstacle, pressing the hydraulic transmission assembly, so that the connecting rod assembly slides downward under the pressure of the hydraulic transmission assembly, and the auxiliary driving wheel descends relative to the main body or the main driving wheel assembly contact with the walking surface A.
[0045] Other technical features in this embodiment are the same as those in Embodiment 1. Please refer to the content of Embodiment 1 above, and details will not be repeated here.
[0046] In addition, in addition...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More