

Stable holder based on MEMS gyroscope combination and control method
A control method and gyroscope technology, applied in the field of gimbal, can solve the problems of large temperature drift, low precision and high noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach 1
[0076] A kind of stable cloud platform based on MEMS gyroscope combination, comprise cloud platform main body and be located at the gyroscope sensor on the cloud platform, described gyroscope sensor comprises:
[0077] Class A MEMS gyro sensor for angular velocity control;
[0078] Class B gyro sensor for attitude resolution and angle control.
[0079] In this embodiment, the sensor unit is composed of at least two types of MEMS gyroscope sensors, and each type of sensor includes at least three-axis angular velocity data. Class A MEMS gyroscope sensors have higher bandwidth and lower noise, and class B The gyroscope sensor has low temperature drift, the data of the class A MEMS gyroscope sensor is used for angular velocity control, the class B gyroscope sensor is used for attitude calculation and angle control, and the angular velocity data of the class A MEMS gyroscope sensor is used as control feedback The direct input of the gyroscope uses the angular velocity data of the ...
Embodiment approach 2
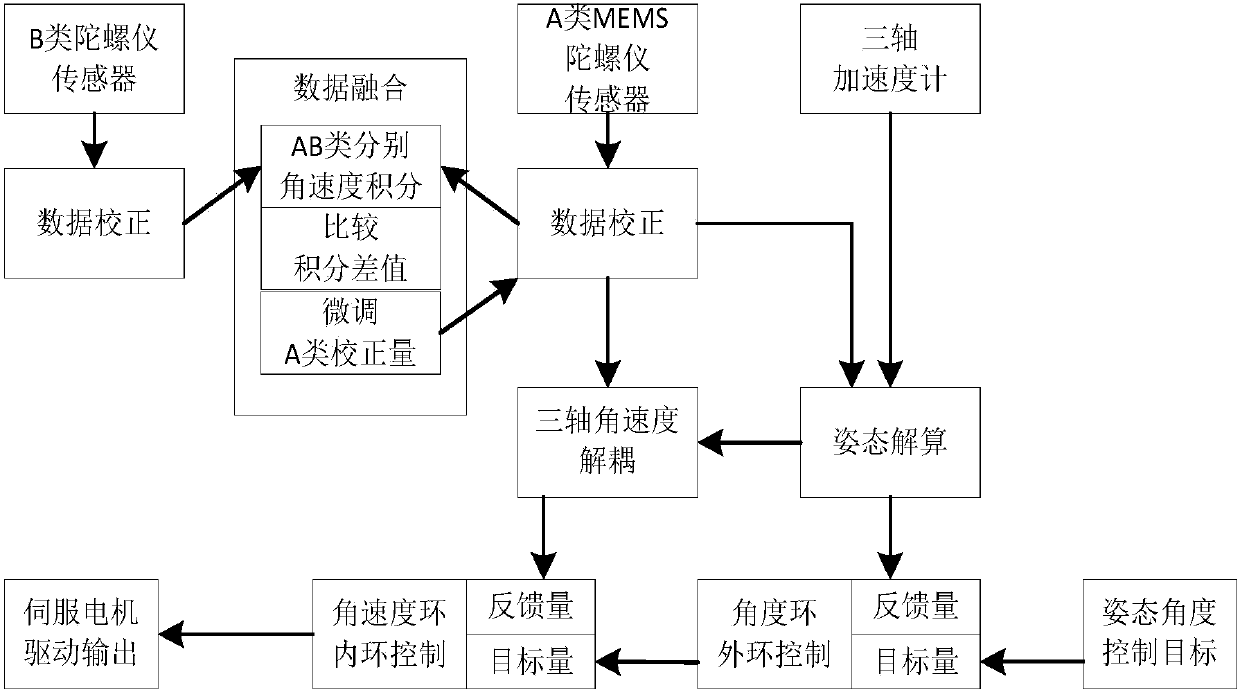
[0081] Such as figure 1 Shown, the control method based on the stable pan-tilt of MEMS gyroscope combination as claimed in claim 1, comprises the steps:
[0082] a. Calibrate the output data of the Class A MEMS gyro sensor and the Class B gyro sensor on the gimbal;
[0083] b. Perform data fusion on the output data of the calibrated Class A MEMS gyroscope sensor and the Class B gyroscope sensor;
[0084] c. Perform attitude calculation on the three-axis acceleration data to obtain the current three-axis attitude angle data;
[0085] d. Execute the feedback algorithm of the outer loop control of the angle loop to obtain the output quantity, wherein the feedback quantity is the three-axis attitude angle data, and the target quantity is the attitude angle control target data;
[0086] e. Decoupling the three-axis attitude angle data and the output data of the corrected Class A MEMS gyroscope sensor to obtain the output value;
[0087] f. Execute the inner loop control feedback...
Embodiment approach 3
[0128] On the basis of embodiment 2, said step a also includes the following steps:
[0129]According to the pre-stored zero point offset data under different temperature conditions, the offset under the current temperature condition is fitted, and the angular velocity output data of the A-type MEMS gyro sensor and the B-type gyro sensor are calculated according to the offset Correction.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More