

A Discrete Dynamic Programming Method for Motion Curves
A technology of dynamic planning and motion curve, applied in the direction of instrument, adaptive control, control/regulation system, etc., can solve the problem of low accuracy, and achieve the effect of improving accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
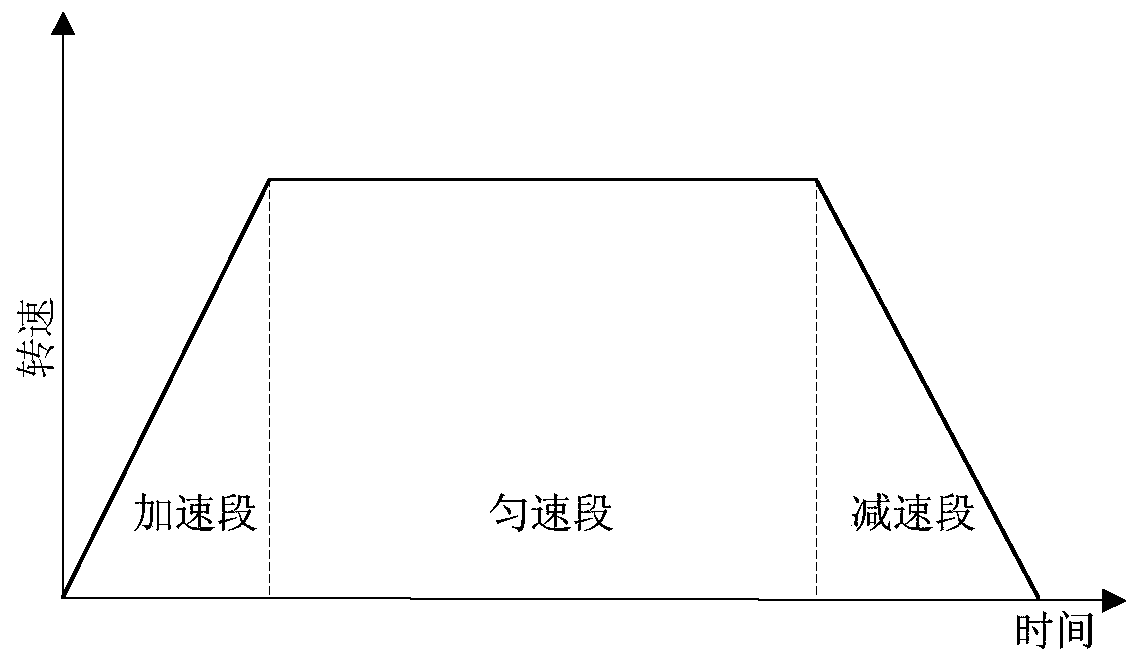
[0040] The invention designs a discrete dynamic motion curve planning method to realize the trapezoidal acceleration and deceleration motion of the object. The trapezoidal acceleration and deceleration curve includes 3 stages: acceleration section, constant speed section, and deceleration section, such as figure 1 shown. The goal of the curve programming method is to solve the acceleration curve equation a(t), when the maximum velocity v m , the maximum acceleration a c , the maximum deceleration a d Under the constraints of , make the object move from the current position s (velocity v) to the end position s e , and the velocity is 0 when reaching the end position.
[0041] The continuous mathematical model of ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More