

AGV station arrival positioning device and method thereof
A technology of positioning device and positioning method, which is applied in two-dimensional position/channel control, vehicle position/route/altitude control, transportation and packaging, etc., and can solve problems such as the inability to achieve the accuracy of ordinary stops.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific implementation manners of the present invention will be further described below in conjunction with the drawings and examples. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
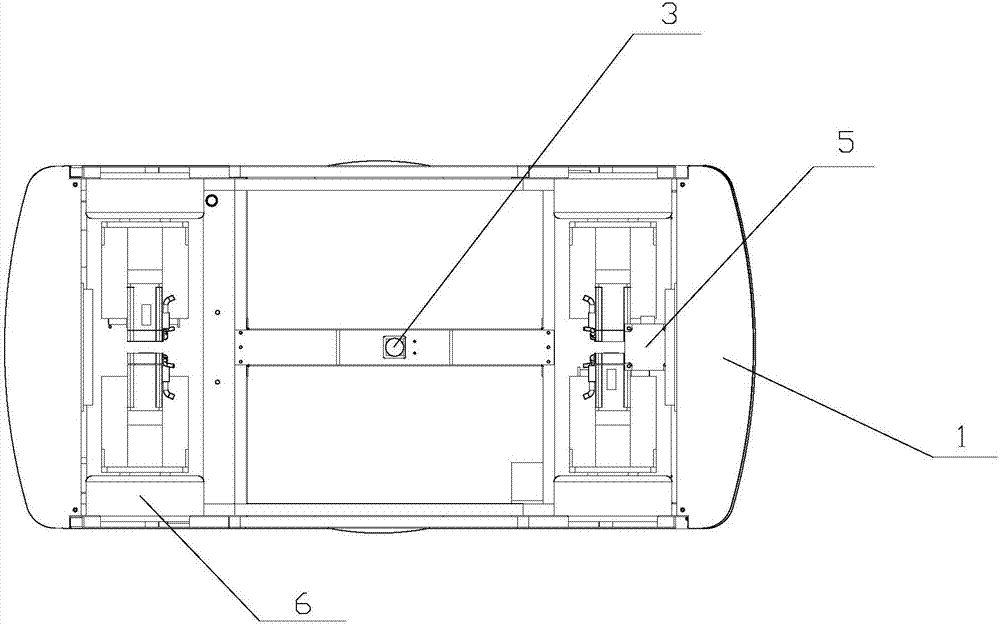
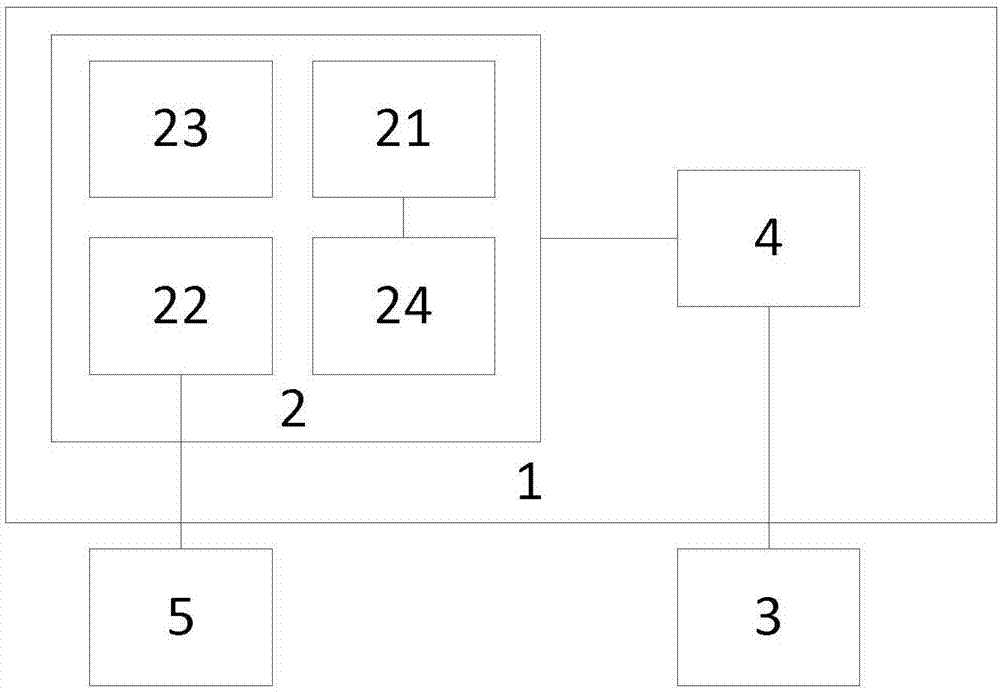
[0026] Such as figure 1 , figure 2 As shown, the present invention is an AGV arrival positioning device, and the device includes an AGV body 1, an AGV control system 2, a CCD camera 3, an image processing system 4, an electronic tag, an electronic tag reading device 5 and a mecanum wheel 6 , the AGV body 1 is provided with an AGV control system 2 and an image processing system 4, the AGV control system 2 is connected to the image processing system 4, the bottom center of the AGV body 1 is provided with a CCD camera 3, and the CCD camera 3 is connected to the image processing system 4, There is also an electronic tag reading device 5 inside the AGV car bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More